


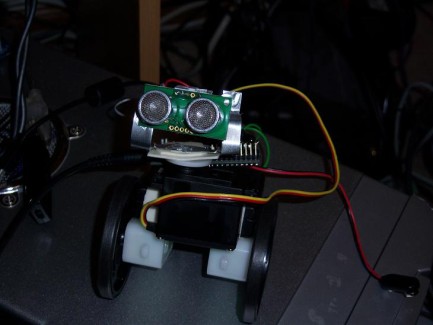
First Robot (Stole Frits' Design)
He is working as well as he could be. Still some minor bugs. If I hold him he doesn't stop until he gets close to something. On the ground he only moves a few inches then thinks he hit something. I think having the servo, motors, and board on the same power source is messing up the range finder. I'll get a video posted tonight.
- Actuators / output devices: one servo
- CPU: Picaxe 28x1
- Power source: 5volt (4AA)
- Sensors / input devices: SRF05
- Target environment: indoor