


First Robot: "R1 Robet"
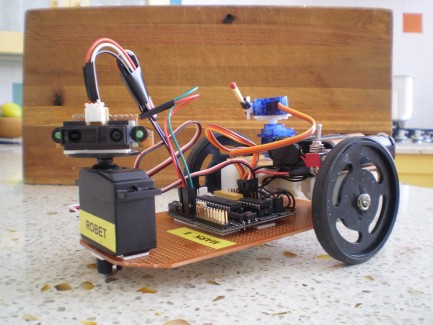
Based off the ever popular "How to build your first robot" by Fritsl, this is the most up to date version of my first robot, named Robet (Robe-et)
My first configuration of this robot had no spare room at all for upgrades, so this version is built with the future in mind:
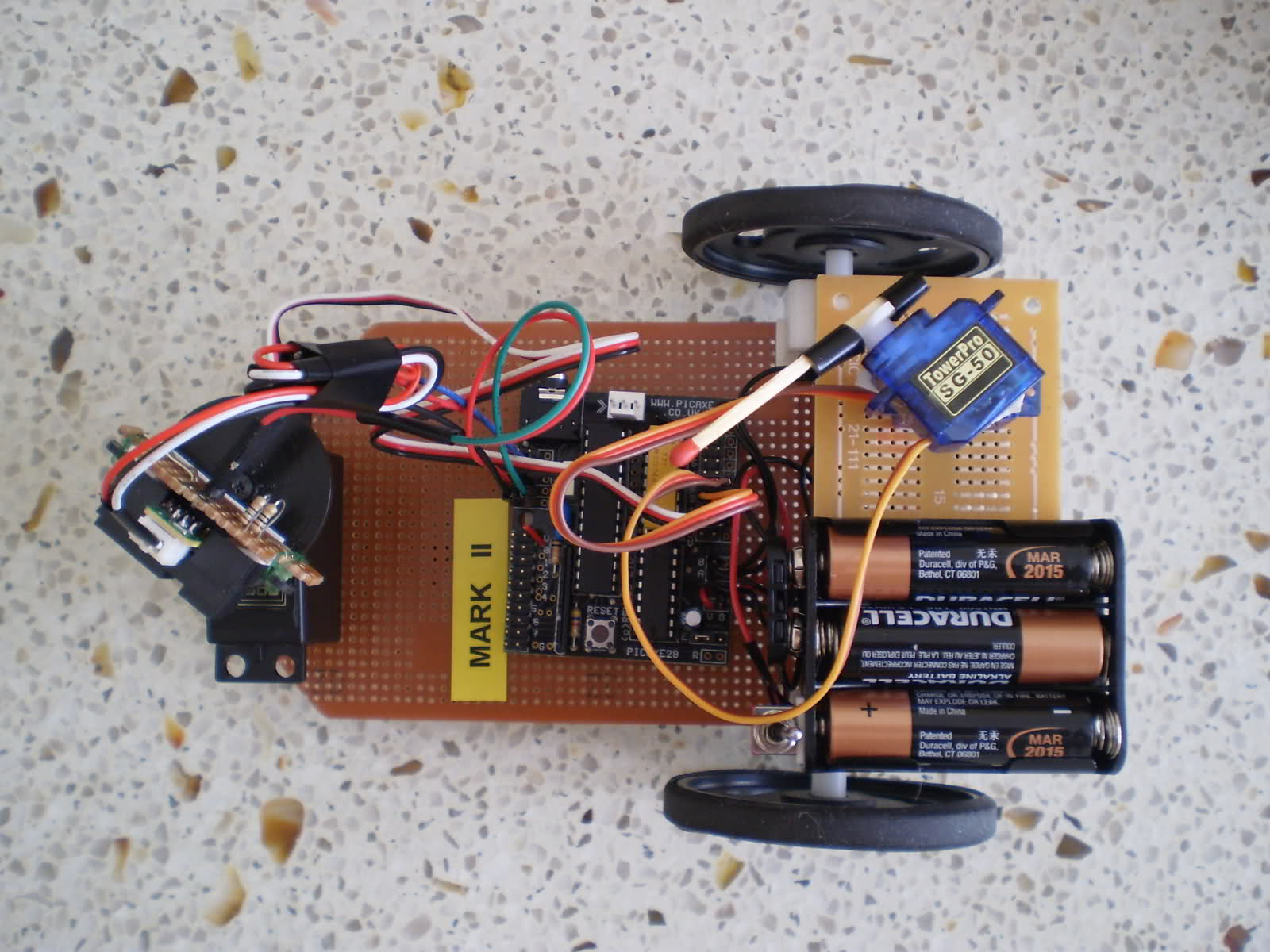
Now with plenty more room for upgrades than my last configuration of this robot. Room for a control box behind the large navigation servo (pushbuttons for different forms of behaviour/routine perhaps?) and a space next to the battery pack that perviously held a speaker, now holds a 2 servo turret.
This robot is constructed on perfboard with the future in mind. This means my little robot could have some hardwired pins that exist apart from the PICAXE project board.
3mm LED's fit perfectly inside the mounting holes of the SHARP IR sensor, so it was only natural to follow up with this. I stuck a cut out section of perfboard behind the IR sensor with two LED's poking through the sensor mount holes to give Robet a little character. They look quite good in the dark.
Robet runs off only one power supply, and i'm not sure but this may be the cause for some twitching from the navigation servo after deciding which is the safer route: something that never happened back when robet was only sporting one servo.
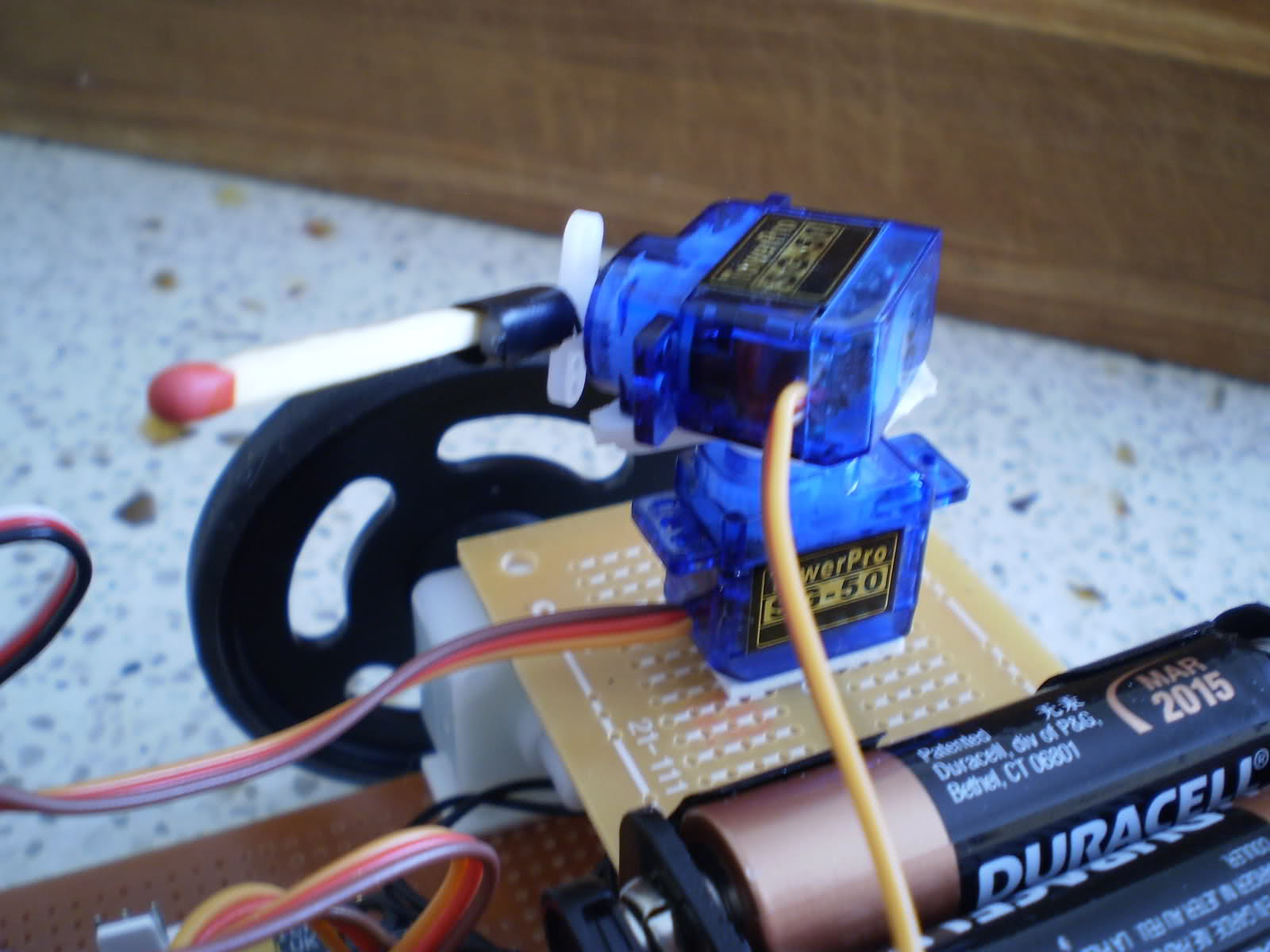
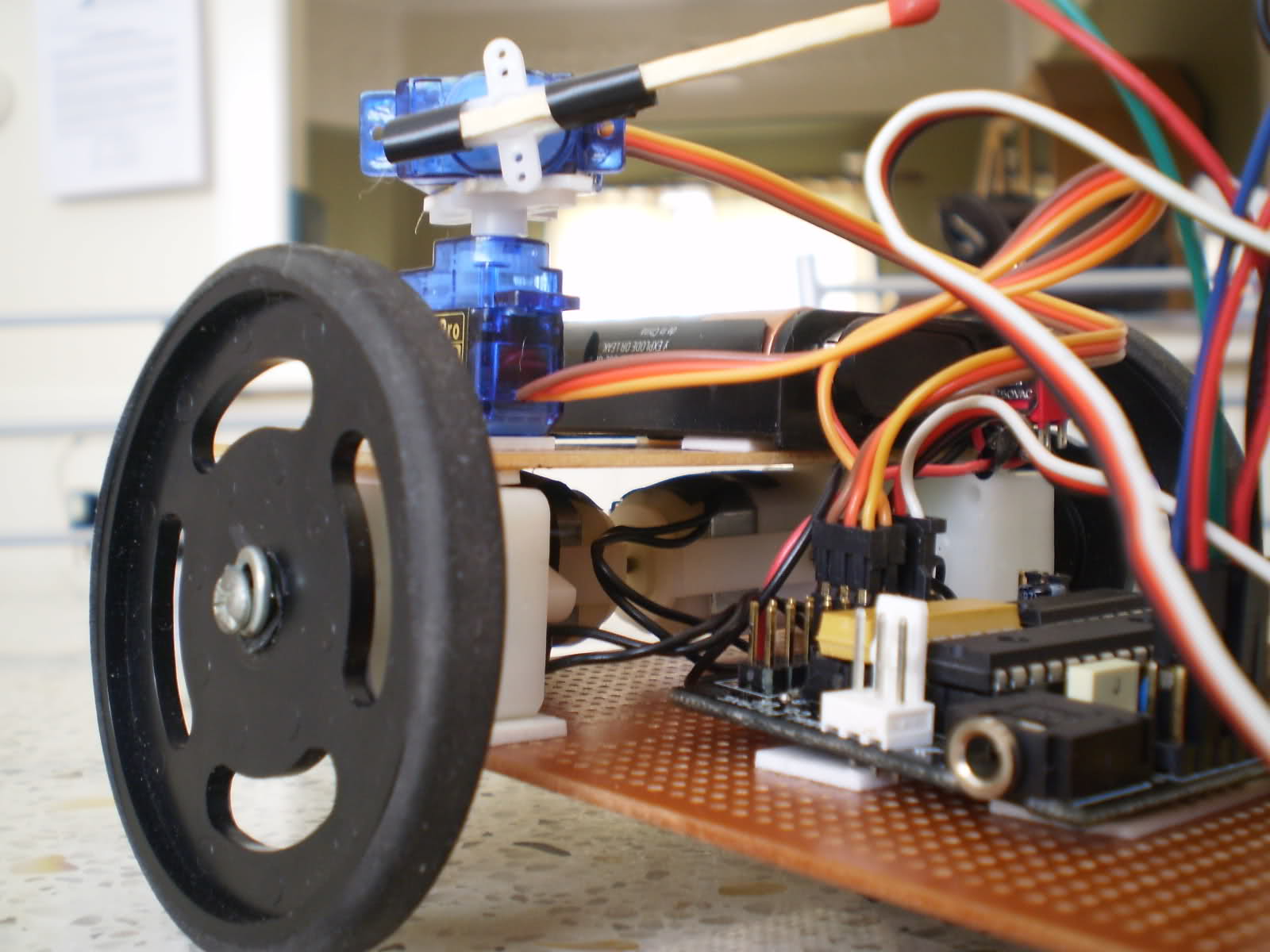
After getting ahold of four micro servos (one of the spare's will be used to automate my light switch) I was just itching to get an object tracker built onto the back platform of Robet. Though these motors are quite weak, and I'm pretty intimidated by the notion of object tracking, as it seems to be something our more experienced users are still having issues with.
The 2 servo turret you see here replaced a small speaker that played music with PICAXE's tune function.
Autonomous navigation via IR
- Actuators / output devices: Three servos, two geared motors (221:1), speaker (superseeded)
- CPU: Picaxe 28x1
- Power source: 4.5 V, 3 AA battery
- Sensors / input devices: SHARP IR sensor
- Target environment: Indoors is best