


First robot attempt, Mr basic/start here hybrid
First of all a big hello to everyone!
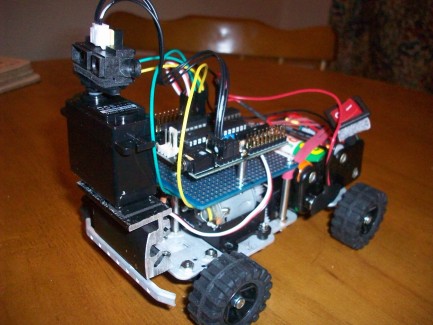
Well after a long wait I've finally had my Mr Basic delivered (I guess the parcel couriers are helping Santa at the minute) and got him nailed together using the start here robot as starting block over the weekend.
The main aim at the moment is to use him as a learning platform as its been a long time since I've done anything like this (High school in the 1980's when Commodore and Sinclair ruled the home micro world). At the moment there is just a servo mounted Sharp IR which is ok but I need to work on a bigger field of detection as he seems to have tunnel vison, maybe make the servo scan or some corner IR sensors?
The chassis is pretty cool, though had a few teething problems with the gear box and 1 motor having a real tight spindle making it run slower and pull more current. Sorted that with a needle file. If you run him just in 2 wheel drive he's dam fast and can't stop in time and the steering then isn't great. 4 wheel drive is much better and even more so with some rubber bands on the wheels for more grip.
- Actuators / output devices: 2 motors, servo
- Control method: autonomous
- CPU: Picaxe 28X
- Power source: 4 AA batteries x 2
- Sensors / input devices: Sharp IR
- Target environment: indoor