


First robot
This was a first robot - really just about getting to try out the technology, learn techniques and get up to speed with how to do this stuff. It avoids obstacles and communicates info about its environment to the laptop. More info on the blog... http://speculatrix.tumblr.com/post/17715143901/getting-started I'll be pulling this apart soon to use the parts to build the next robot.
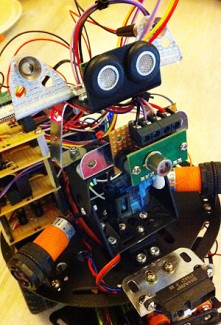
Avoids obstacles, builds thermal images
- Control method: Mostly autonomous, though some control via Bluetooth
- CPU: Arduino Mega
- Power source: 7.2V lipo, 5x AA
- Programming language: C++ for onboard processor, Processing for laptop
- Sensors / input devices: Sharp IR, TPA81, SRF10 ultrasound, IR proximity sensors