Get Started
Sign In
Menu
Dashboard
Forums
Tutorials
Robots
Blogs
Leaderboards
Shop
Support
Get Started
Sign In
go
First Robot
Posted on 03/08/2008 by
vansu
Modified on: 13/09/2018
363
0
10
Liked
Like
Comment
Share
Project
First Robot
Press
to mark as completed
Introduction
This is an automatic import from our previous community platform. Some things can look imperfect.
If you are the original author, please access your User Control Panel and update it.
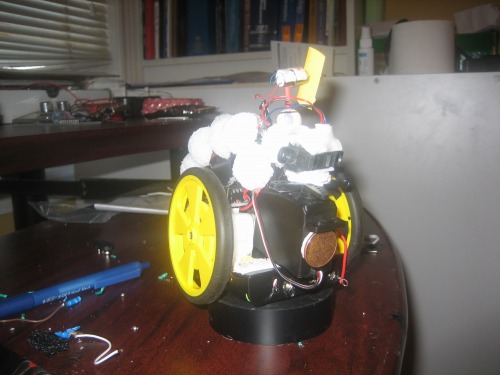
First Robot
First Robot
First Robot
Avoiding obstacle
Control method: autonomous
CPU: Picaxe 28x1
Power source: 4-AA
Sensors / input devices: SHARP IR sensor
Target environment: indoor
Liked
Like this to see more
Spread the word
Flag this post
Thanks for helping to keep our community civil!
×
Notify staff privately
It's Spam
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
Report Reason
You flagged this as spam. Undo flag.
Flag Post
Share this page
Share a link to this page: