


First of many...hopefully.
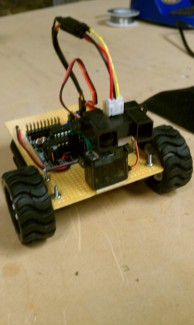
This was my first robot. It had been awhile since I did anything with electronics, so I had quite a bit of refreshers needed on soldering, etc... I modeled this robot after the "start here" model on LMR site with a few modifications. The first version I built had a 3xAA battery holder (the one that came with the Picaxe controller) but I wanted the ability to recharge the unit easily so I replaced it with a 5V charger battery from Radio Shack. The charger has a USB for charging the battery pack and an on/off switch so for less than $15 I was able to upgrade the robot to rechargeable status while adding an on/off switch. I'm using a micro servo that I got from a hobby store to turn the Sharp IR sensor. I chose the longer range IR sensor and it seems to be working well. I started with a pair of 32x7mm Pololu wheels but I have changed them out to the 42x19mm wheels/tires. I need to switch the motor mounts to the extended version in order for the motor shaft and the larger wheels to properly match up but they work ok for now with the standard mount. As a rear, third wheel I am using an adjustable, omni-directional ball caster with ball bearing. This works great on hard surfaces and even short carpet but tends to get caught on some rougher surfaces. Next I hope to mount a laser module to a secondary servo and write some code to menace the dog with the red dot. My next robot project is going to be a mounted airsoft gun with targeting capabilities.
Navigates via infrared
- Actuators / output devices: 1:100 Micro Motors
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 5v Evercell USB Rechargeable
- Programming language: Picaxe basic
- Sensors / input devices: SHARP IR sensor
- Target environment: indoor