



First attempt at robotics
Hi guys, First robot, and first post for me. I'm sure mines the same as most peoples first bot so nothing special here. its just an object avoidance bot, made with arduino uno and basic parts.
I bought the arduino around 2 weeks ago, never touched anything like this before. good at following instructions but total noob when it comes to building robots or electronics. so please dont abuse me in the things ive done wrong.... or just be gental at least ;)
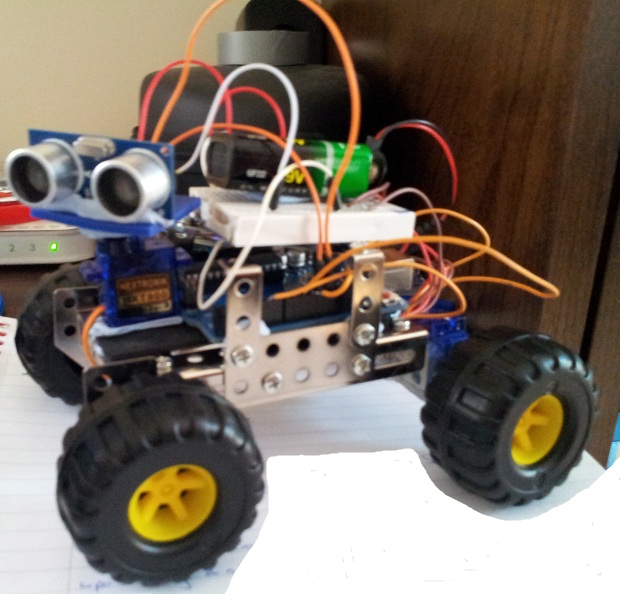
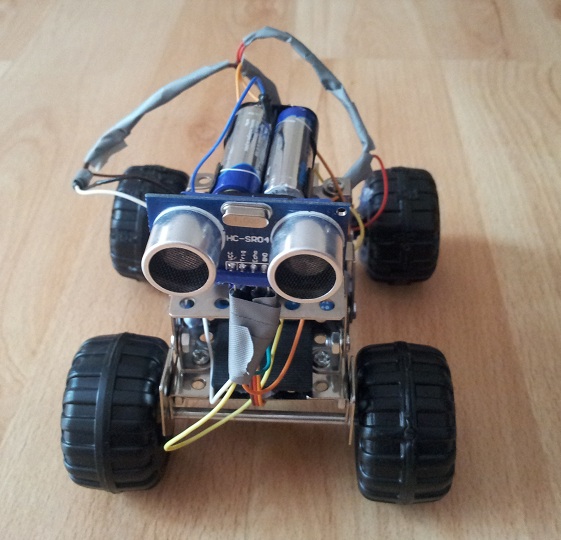
With my arduino came a HC-SR04 ultrasonic sensor, and the first thing i though was they look like eyes... (im sure everyone does) so straight away though that needs to go on a servo and be a head. :)
Not got lots of money and wanted to see what i can do with minimal money, luckily i found the below. for £6.99 and £2.99
I'd say i've used a quarter of the parts with this bot.


Also bought glue gun and other tools, not really used my dremel yet, looking forward to it though. :)
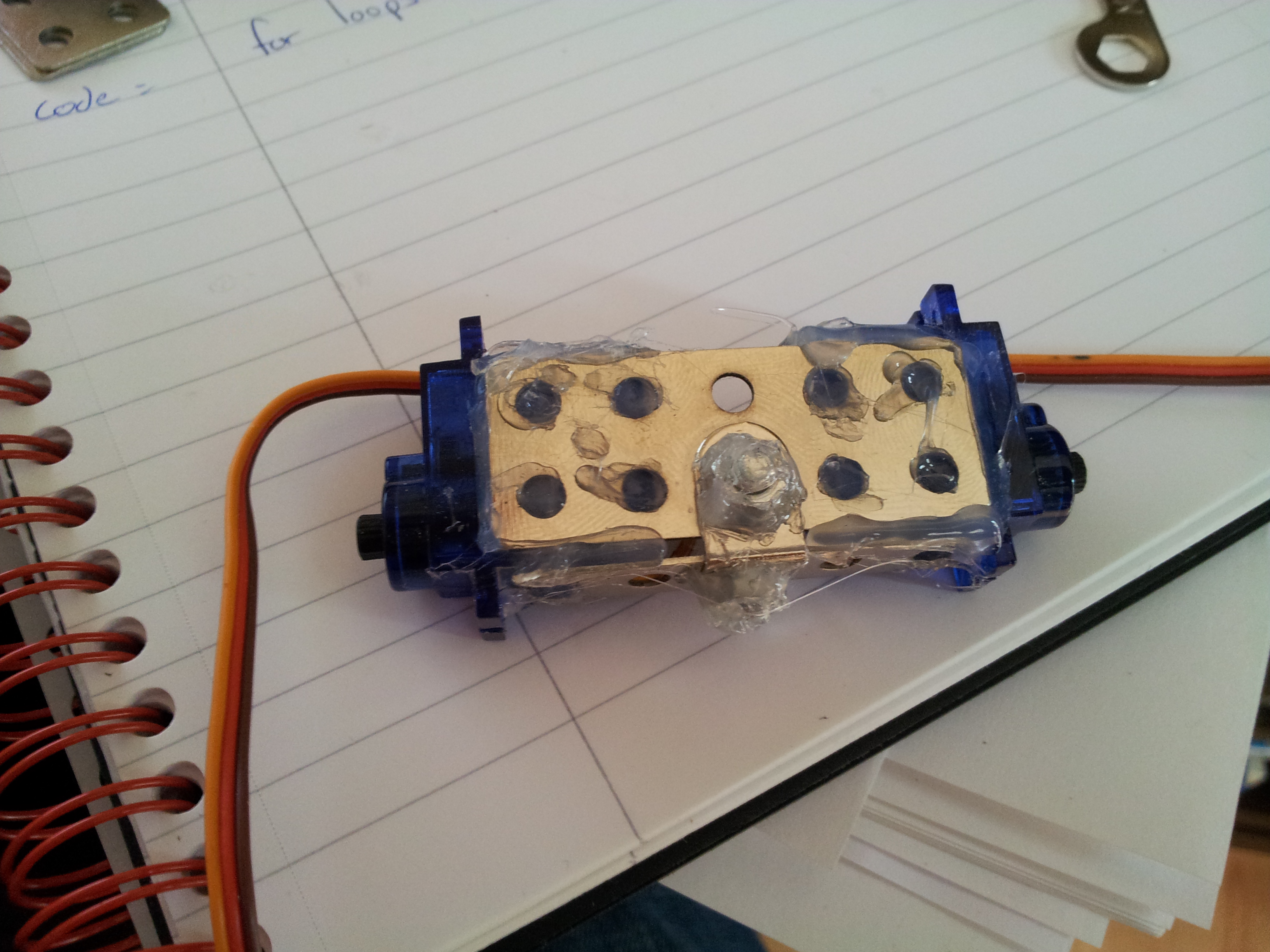
First attempt at getting the servo horn on the wheel failed, as the plastic was so smooth it just came straight off. I saw a video on manipulating cockroaches, and the guy mentioned sanding the smooth surface down so did that. Its now stayed on :)

Made some brackets from the kit, and a bit of hot glue to secure them.
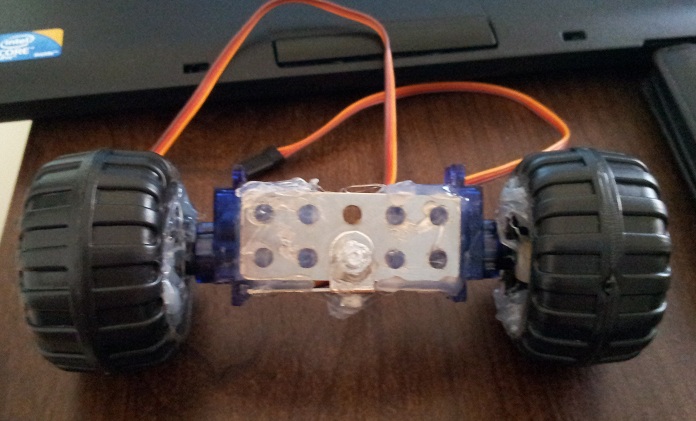
Below is when it really started to come together, well in my eyes it did :) i used bluetac at first which helped in some situations but not others. read last notes for mistakes i made and corrected.

my biggest and most embarrassing mistake was thinking i could power every thing, arduino, servos and sensor from just the 9v. :(
(breadboard with 9v battery ontop)
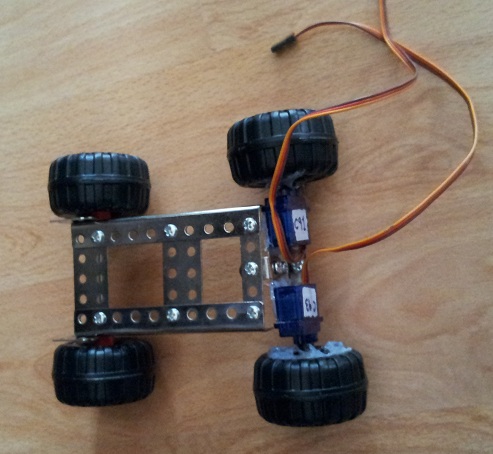
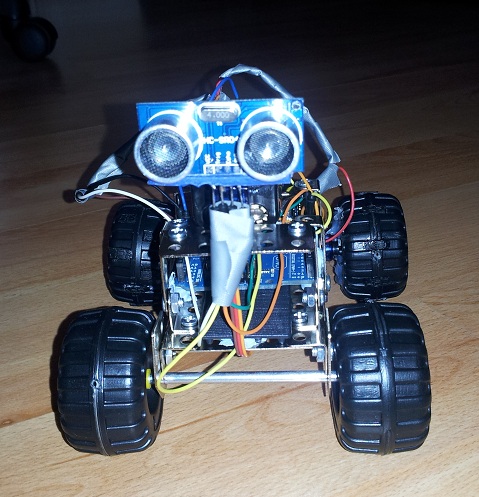
As my house is all laminate and tiles, plastic wheels are a load of pants!!! so i cuts some strips out and added in pieces of rubber. Wouldnt say its the best way but it works :)

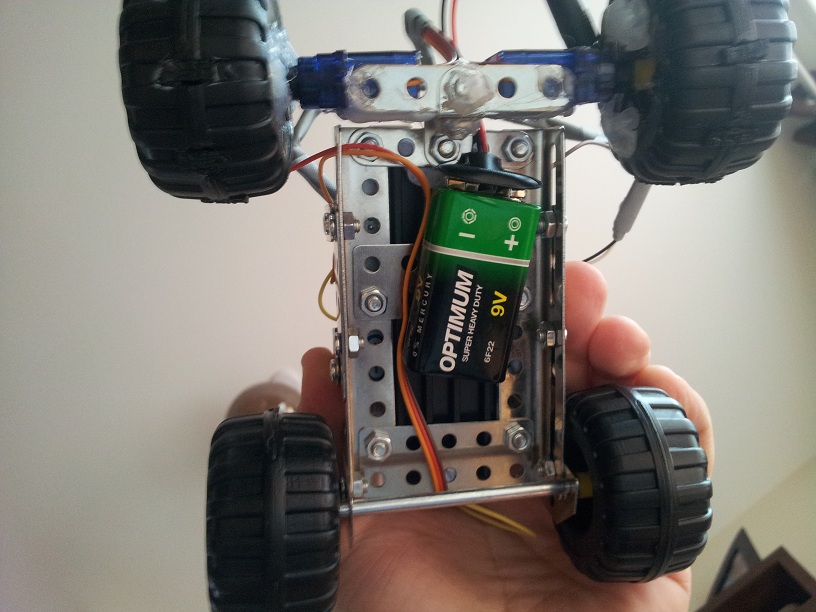
After a little bit of reading i ordered a 4x aa battery pack. put the 9v battery underneath and used that just for the arduino. What I still dont get is why usb worked fine. this due to amps???
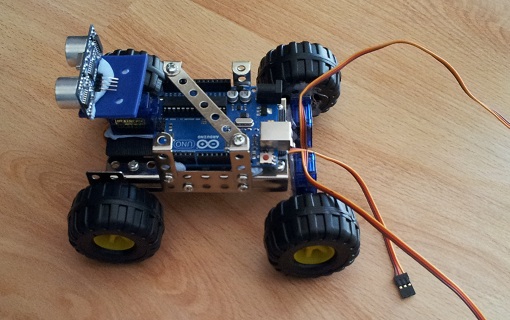
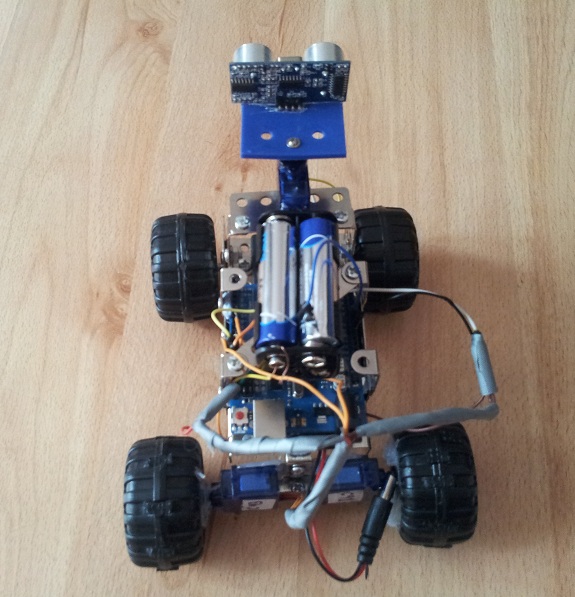
Stripped out the breadboard so that the battery pack coud sit up top.

And a size comparison, as they cat wanted some camera action aswell.
Like I say first time doing robots/electrics and programming, think I've done ok, but will take and critism :)
I will post vid up once I've tweaked the code. based off the turtleduino code.
Thanks for looking.
Craig
Navigate around via ultrasound, decides which way is less obstructive
- Actuators / output devices: 2x hxt 900 continuous servos and 1x hxt900 std servo
- CPU: Arduino
- Power source: 1x 9v for arduino 1x aa battery pack for motors and sensor
- Sensors / input devices: SRF04