



Fire-Bot
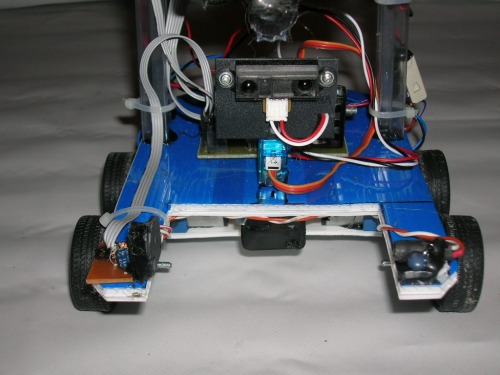
This is an autonomous hobby robot application, that finds the candles and then blows them out. Fire-Bot has a Sharp GP2Y0A21YK0F to detect the candle and get closer to it. To determine that the Fire-Bot has reached the optimum distance to the candle, I've used a TSOP1738 IR receiver. When the Fire-Bot catch the candle the DS1821 detects the temperature and the fan is turned on to blow air.
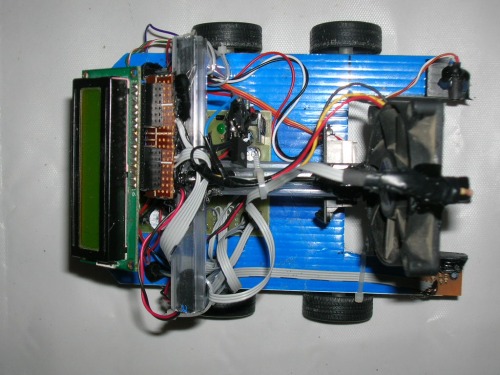
DS1821 was placed on the fan. The candle's fire is controlled with DS1821 to determine whether the candle has blowed out or not.
The temperature can be observed from the LCD through the process.
Fire-Bot has two DC motors that are controlled with PWM by using the PWM property of PIC16F877A. Sharp sensor was placed on a small servo to search the candle effectively.
To see my other robot projects you can visit http://www.robotiksistem.com/robotproject.html
Find Candles and Blows out
- Actuators / output devices: DC Motors, servo motor
- Control method: Full autonomous
- CPU: PIC16F877A
- Programming language: CCS C
- Sensors / input devices: Sharp GP2Y0A21YK0F IR sensor, DS1821 Temperature sensor, TSOP IR receiver
- Target environment: indoor