



FER Hexapod
Hexapod Robot using Gizduino(Arduino alike),Serial 16-channel servo controller, 12 standard servo, 1 micro servo, home made 5V DC voltage regulator, home made fabricated aluminum chassis. It took me 6 months in the making due to work/job and some budget problem on making this robot. I encountered some problem like the power requirements of the robot, until I learned on this site that really help me. The robot still under construction and need some adjustment. I think the hardiest part was the forward movement of the back feet which support the entire weight of the robot while walking. You need also to learned the basic locomotion of a six legged insects that will help you a lot.
Complete Parts List:
Chassis and legs: Aluminum
Servos: 12 pcs Tower Pro SG5010
1 pc GWS Naro HP/BB
Controller: Gizduino (Arduino Uno compatible)
Sensor: HC-SR04
Servo Controller: 16-Channel Servo Controller(Arduino compatible)
Other Parts: 5V DC voltage regulator, Switch
Code: Using arduino IDE
Power Source: at this time I’m using a 9V DC adaptor to supply the robot
It started with the Assembly of the Aluminum chassis and the six legs(no picture):
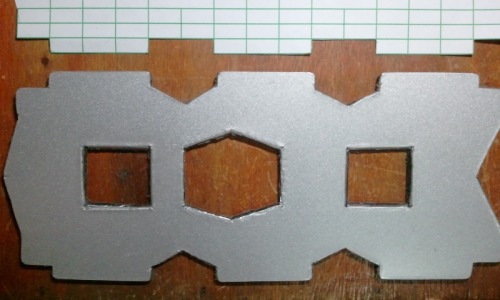
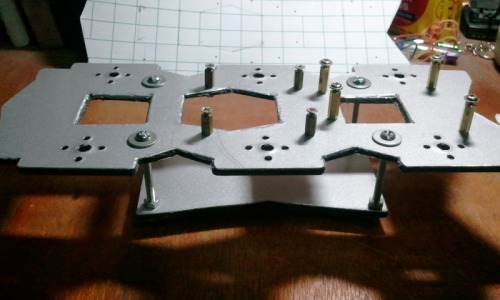
Making holes for the servos and with the support brass bar:
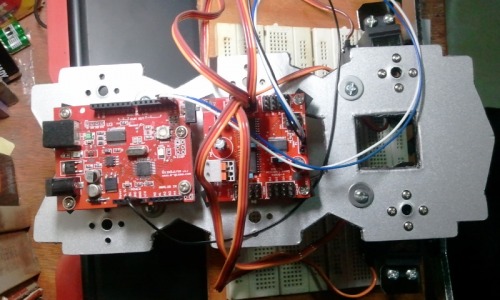
Now installing the Gizduino(Arduino alike) and the standard servos.The legs which I changed it later due to the distance between the center of servo and the leg is too long that will make the weight of robot heavy and too much force to the ground. I made new legs as you see in the video.

Installing the 16-servo controller board also from our local hobby shop.
Installing the remaining servos and legs. Putting the Micro servo that hold Ultrasonic Distance Sensor. Notice that I change the design of the legs.

The top view:

Now the 5V DC voltage regulator:

The complete Robot:

No battery yet up to this time.
The program Code: See attached file.
Autonomous hexapod robot, walk around avoid obstacle using ultrasound sensor.