


Fanuc End Effector
So I guess this counts as a robot project. Still haven't got much done on my own robots at home, so I figured I'd post about the robot at work. I'm a lab aide for Heartland Community College in their robotics, automation, machining, and electronics labs. We have a huge conference coming up so I've been redesigning the end effector on our Fanuc LR Mate. The purpose of the end effector is to screw in 4 screws on a part as it travels around an assembly line. It also has a gripper for other tasks that we may come up with later (thinking solving rubiks cube :) ).
The company we bought the assembly line trainer from sent us an end effector that used a Black and Decker screwdriver. It seemed really cheap compared to the rest of the equipment, and we were having problems with power, tolerances, and torque control. You can see in this picture the set up, plus a torque driver that I made. The driver is a little over the top, but why not :)


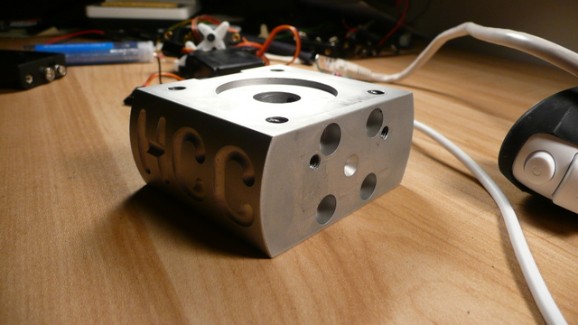
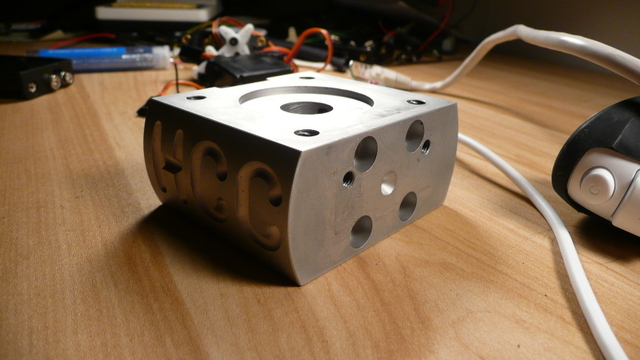
So now on to my new project. I decided to switch the Black and Decker out for a stepper motor. I've got the mounting base all finished up, as well as the screwdriver extension. Now I'm on to the electronics.


Next step is to build a stepper motor controller/driver that I can controller via the robot controller and use in programs. Does anyone have any plans for a beefy stepper motor controller that can controller on/off, forward/reverse, and stepping speed? I have a kit that was used in an electronics class, but I'm a little worried that it won't be built well enough to survive years of abuse by students.
Well that's it for now, I'll post some pics of the end effector mounted, and whatever I come up with for the controller. Cory