



famous hexapod robot (video added)
spidy chan!
yup!its a japanese nickname which is given by my friend :)
ive made another big one with DC motors few years ago and it could only walk in air!cuz i forgot about weight,..silly me!
but then i got these small servo motors and nice smd atmega8 which let me make it small and light weighted.
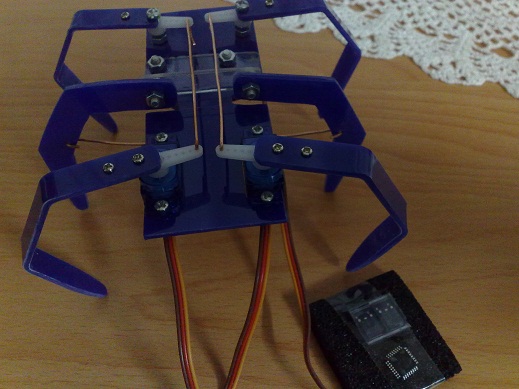
these stuffs bellow (and ofc the sg90 servos) were what i got before making the robot

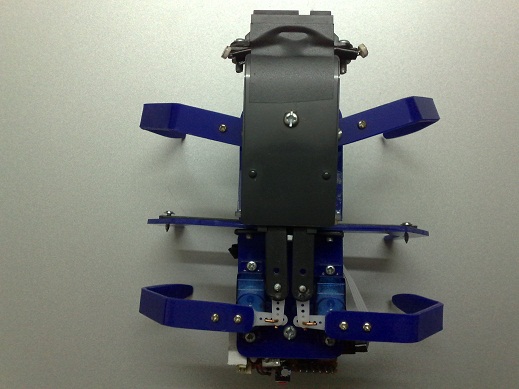
then i made the prototype chassis:
first i had no idea what exactly do i want from this little spider.
after staring like 30 minutes to SHARP IR sensor,i was like OOOOHHHH....!
i took a break and start zapping.after another 30 mins i was like OOOOHHH...!!again!(thats how i realize things)
so i decided to give him two modes.auto and manual (like i used to).
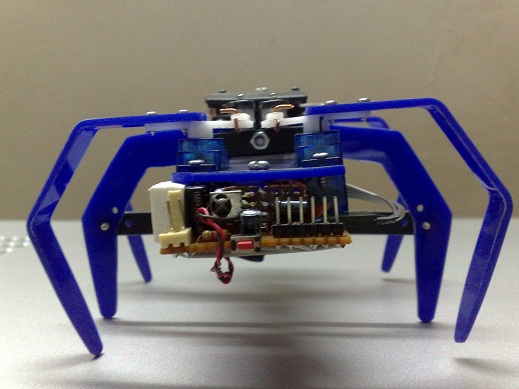
in this pic u can see the receiver RC5 sensor i used:
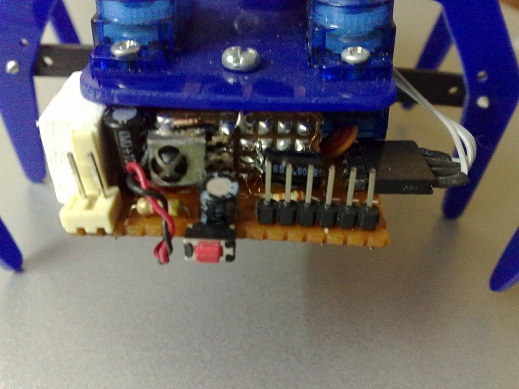
im silly so no wonder if i used ENAMELLED WIRES instead of SMD ADAPTOR board.only a small piece of board holds the power supply elements and PIN HEADERS and well..everything except MICRO..
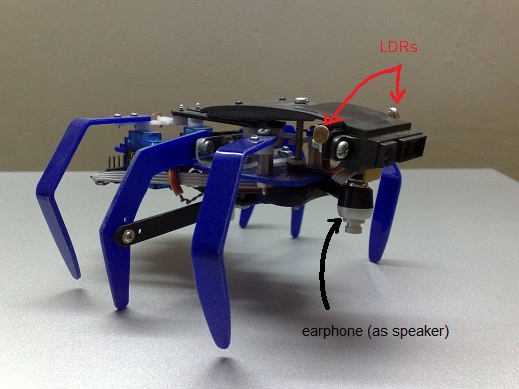
an earphone is used to make various sounds.and a pair of LDRs to follow the light:
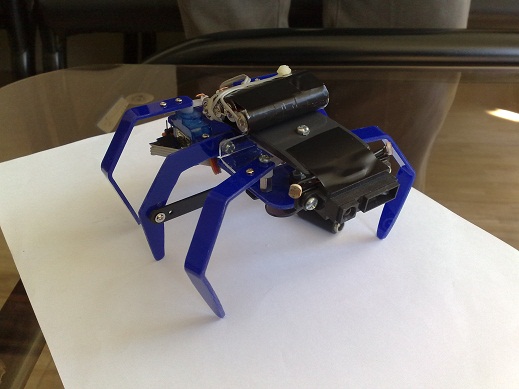
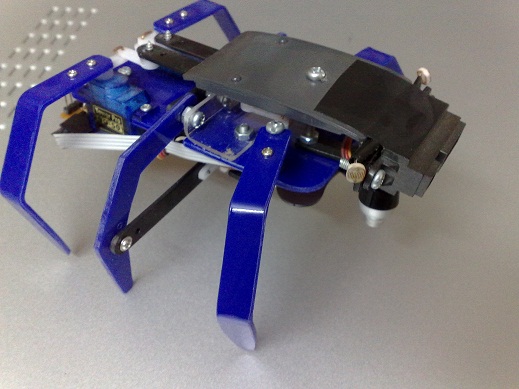
now he's ready.in manual mode u can walk him to any direction and also u can enter the MENU mode to check every motors.
by pressing the AUTO button,he'll follow the light and avoid the walls (sometimes he likes to hit!i need to modify the codes but later..).and again u can disable the LIGHT FOLLOWING so he will walk forward untill a wild wall appears!!
if the infront object moves toward him,he'll walk backward and then turn to right.and of he makes sounds!:)
i got 4x AAA cells to supply him but it was a bit heavy so i decided to remove it

codes will be uploaded by request.

ok i admit the video is a FAIL!lol
wanders around,follows the light,avoids the walls
- Actuators / output devices: 3 x sg90 servos, small earphone as speaker
- Control method: IR remote and autonomous
- CPU: atMega8
- Power source: 4x AAA
- Programming language: Bascom AVR
- Sensors / input devices: Sharp IR, 2 x LDRs, RC5 sensor
- Target environment: indoor