


Failed Robot Takes Up Dancing
You know how it is sometimes, you start something and everything along the way goes wrong.
This project started as something to get me into object recognition, but failed dismally.
The robot started out as twice it's current size and weight, but the motors were very slow. So me, being a clever Dick, decided to modify the gearboxes, to make it faster. Yep, worked a treat, but then they didn't have enough torque to actually move the bot! Far too heavy with all it's batteries (for electronics, and old wireless CCTV camera I was going to use), and the camera itself.
While I was pondering my next move, I checked out the camera, with everything in the bot doing it's thing. Sure enough, the picture quality was dreadful, and no way was my PC going to recognize blobs. Cheap and nasty old camera, and with all the noise going on, a waste of time.
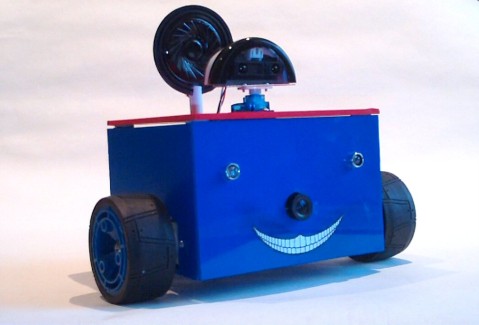
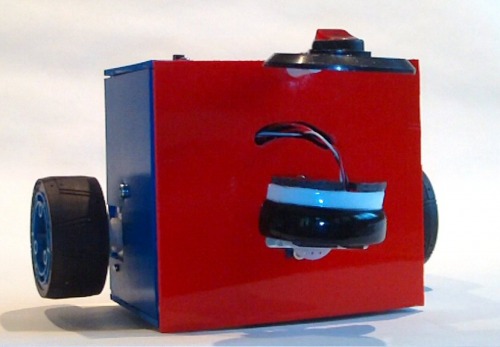
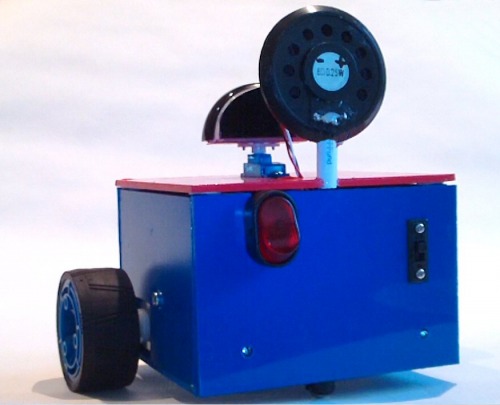
Oh, well, back to the drawing board. Actually, no. Get the saw out and cut the bot in half and just use it for obstacle avoidance, with light and sound. At this point, I intended calling him Lazarus. Re-using the front and back, and disposing the CCTV camera, surely it must work now.
Nope. One of the motors is poorly, and the bot now goes around in large circles. Also, after carefully(ish) mounting a nice speaker, the interference from the servo and motors, makes the sound very crackly.
The object avoidance, and lights work a treat, but I've decided to start from scratch again.
Before I take it apart, I had a little fun with the code, but didn't spend long on it. My photography, especially video editing, isn't up to scratch, either. (As for my choreography - forget it !)
Enjoy ;)

- Actuators / output devices: 2 geared motors, 1 Servo
- Control method: autonomous
- CPU: Picaxe 28x1
- Operating system: Picaxe
- Power source: 4.5V
- Programming language: picbasic
- Sensors / input devices: Sharp IR GP2D12
- Target environment: indoor