



Explorer-Bot
First, sorry for my english.
I'm new to Robotics. I got my interesting in robotics hobbies after my cousin gave me a book titled "Beginning Arduino".
After playing with blinking LEDs and several sensors for several month, then I try to make a simple robot that controlled wirelessly by remote control using Xbee.
I chose the 6WD Wild Thumper 75:1 as the chassis. For the first, I want to use sizes C NiMH battery pack as it was recommended battery for that as the power source, but I can't find it here in my city, so I try to use 6 sizes C NiMH battery using battery holder but I found battery holder became useless if we have to prepare several ampere for the wild thumper geared motors.
Finally I found that 6V4AH sealed acid battery working just fine for it, I use two in parallel so I got 6V8A. The cover plate need to be higher so I add more 1 cm spacers and the batteries now fit inside the chassis.
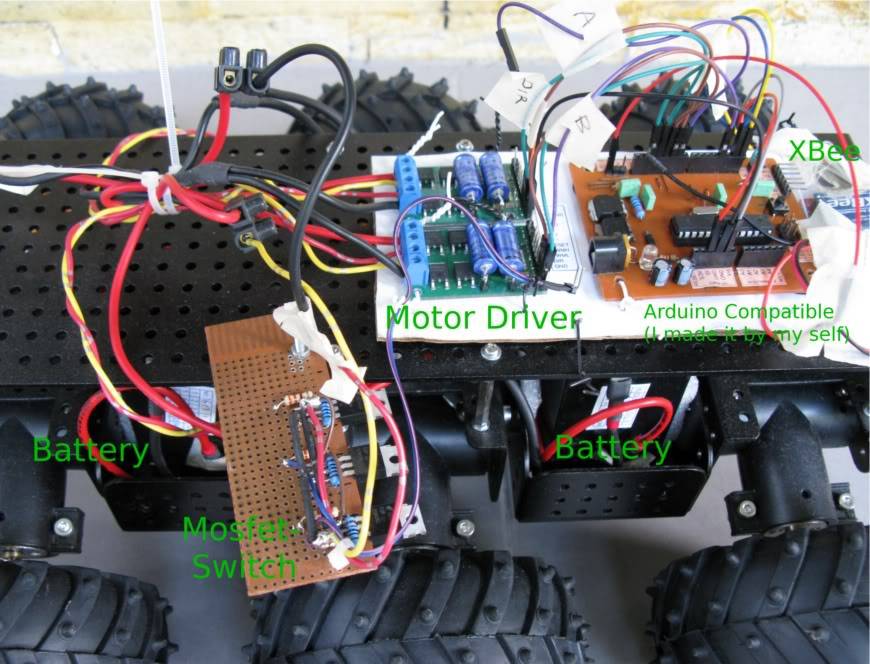
I am using arduino compatible and 3 mosfet in parallel as a high power switch, it can handle the current without any heat sink, and for the motor driver I use two "pololu high-power motor driver". For the next I will add several sensors.
As a beginner, writing the code was really challenge. I found good explanation here and here in the book. Serial communication need fast enough so we can drive the wild thumper smoothly and the Xbee module's configured at 57600 baut for that.
Update:
Finally, I got my robotics time.
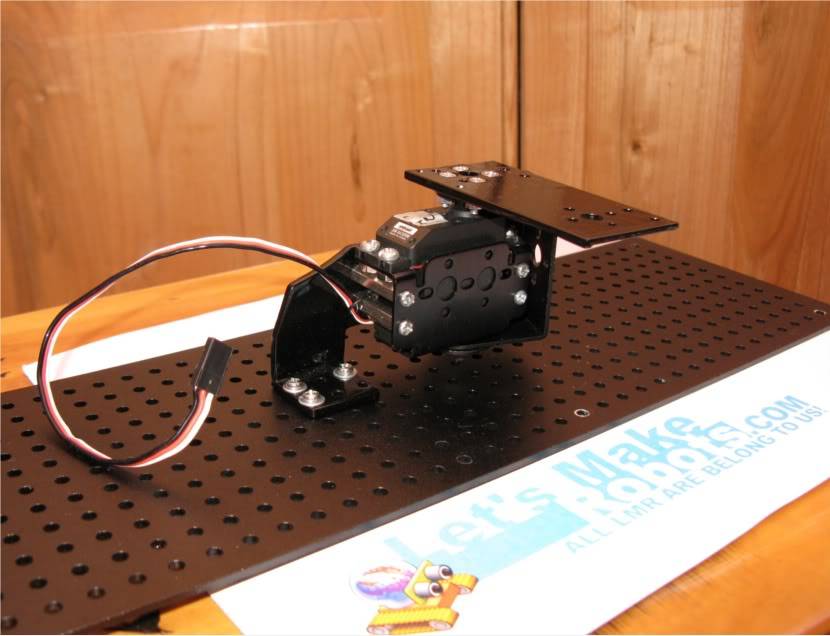
The Explorer-Bot now with Pan System.

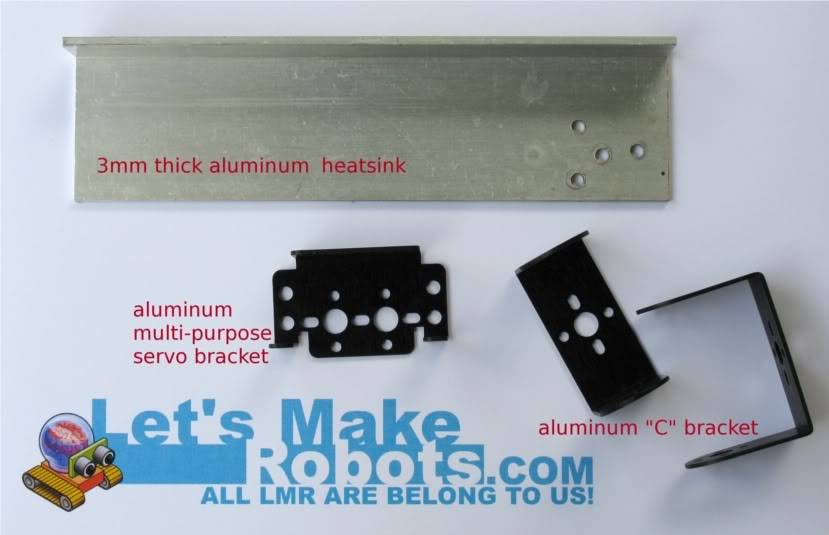
I made multi-purpose pan mechanical system using 3mm thick aluminum heatsink and servo brackets.



Here is the result.
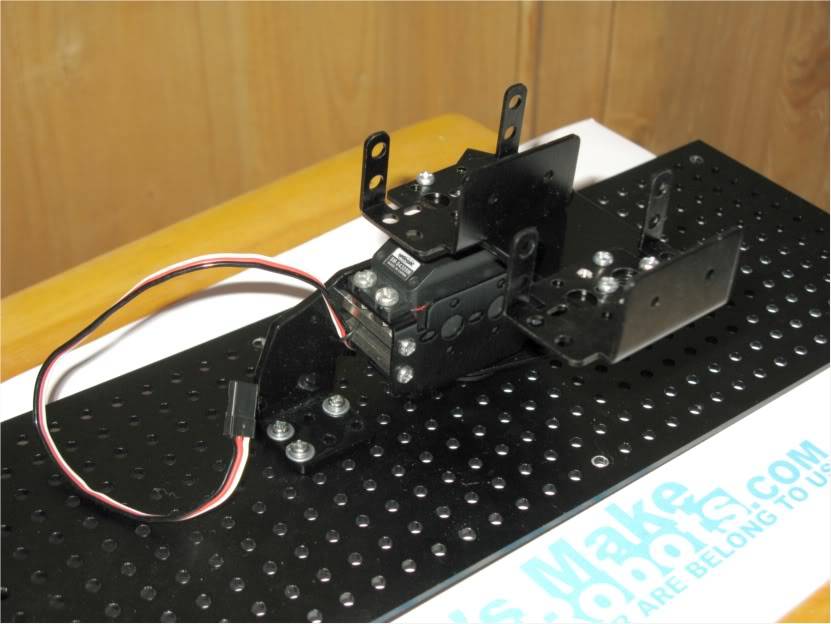
With multi-purpose servo brackets.
I re-arrange every thing and fits it's together under the deck so it's not look too messy anymore.
I still use my home made arduino compatible for now.

This tutorial really help me to solve my problems while I wrote the code, Thanks RobotFreak.
- Control method: Serial Communication using Xbee
- CPU: Arduino compatible
- Operating system: Linux
- Power source: 2 x 6V4AH
- Programming language: Arduino C++
- Target environment: Indoor Outdoor