



-=eXplorer=-
Hello
First of all, I want to congratulate you for a nice place you made here . I'm glad to find a such passionate and innovative group here.
I'll show you my little robot and how it change in past 2 months since I begin to work on it.
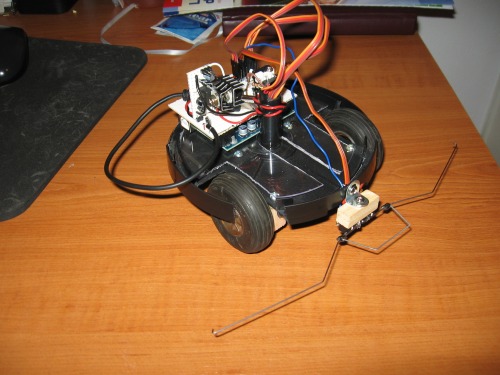
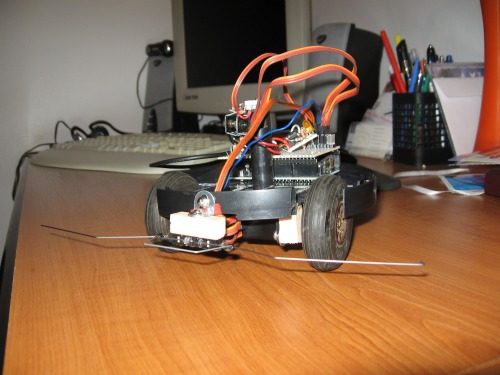
Version 1, above picture, has simple obstacle avoidance using whiskers and 2 micro switches. CPU - Arduino 2009, drive - 2 hacked servos, power 3s LiIon cells.
Step 2 was to made 3 colission detection sensors, using ultrabright red LEDs and photoresistors. They worked well, but chassis was too small and I decided to build a new one to accomodate new sensors.
Arduino, servos and power regulator were moved to new chassis, bigger weels and LiPo power pack added.
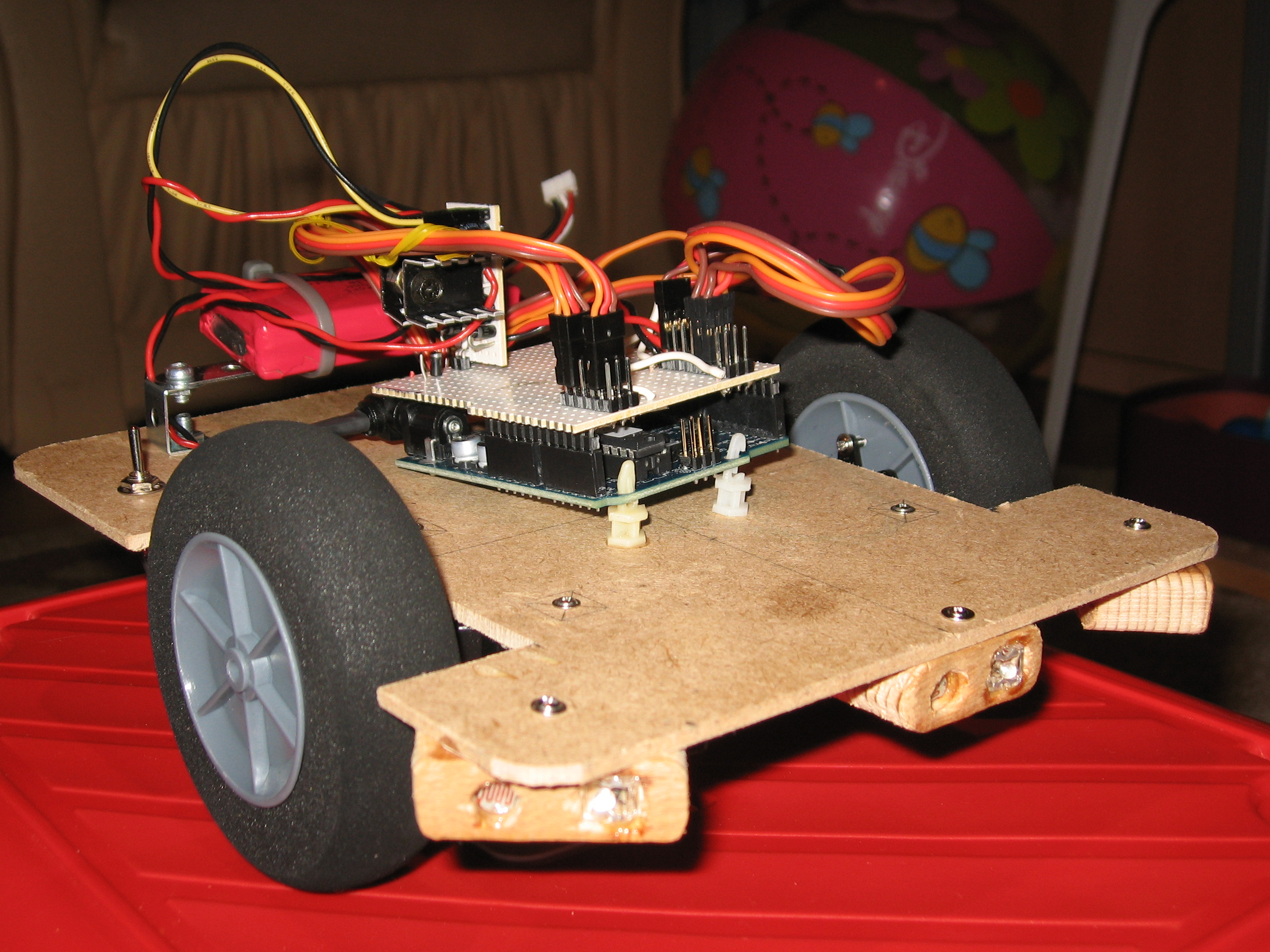
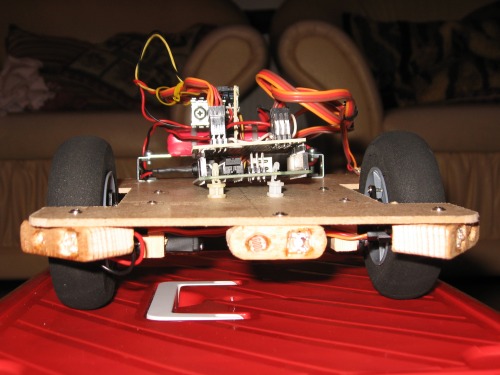
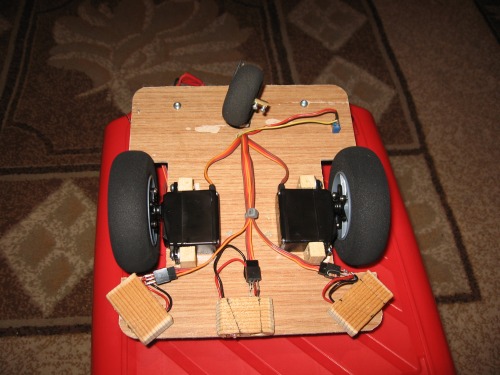
You can see on wood blocks guide lines I draw for LED and photoresistor channels.
This system worked verry well, but was verry sensitive to ambient light so I decidedit was time to something advanced.
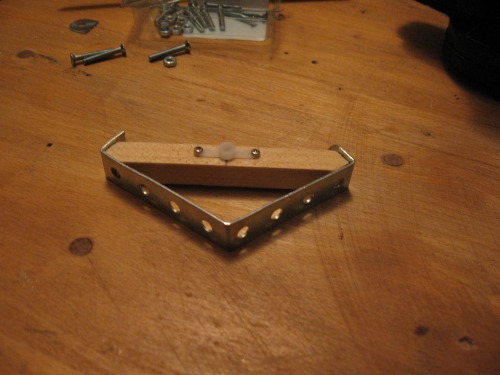
So a pair of Sharp GP2Y0A21YK0F is used for new detection system. I mount them on an oscillating head, to cover a wider angle and to speed scanning process.

Work is in progress to smooth navigation and to develop more behavior modes. Meantime, enjoy the videos.
www.vimeo.com/7671661
www.vimeo.com/7671845
www.vimeo.com/7813518
www.vimeo.com/7842332
Wall follow and obstacle avoidance using Sharp IR sensors
- Actuators / output devices: 2 modified standard servo
- Control method: Autonomous.
- CPU: Arduino Duemilanove 328
- Power source: 8.4V / 1300 mA LiPo
- Programming language: Arduino
- Sensors / input devices: Sharp GP2Y0A21YK0F IR sensor
- Target environment: indoor