



EX1 - Earth Explorer One
This is my robot "Earth Explorer One". My inspiration are the Mars explorer robots and after many years of wanting to build one, I've finally started. Now I would love to have a robot go to Mars, or even the Moon... but I don't have a rocket. And my wife won't let me build anything that can explode. So this rover will expore my house, back yard and the neighbourhood.
Some of the components are:
- Dagu Wild Thumper 6WD All Terrain Chassis (Aluminum, 75:1).
- VIA P910-10Q 64-Bit Quad Core Processor running Windows 7.
- 8GB Ram, 256GB SSD.
- Dagu "Wild Thumper" Dual 15A Motor Robot Controller.
- Phidget Advanced Servo Controller.
- Two Phidget IO Interface Kits.
- RobotShop M100RAK V2 arm with Dagu gripper.
- SPT200 Direct Drive Pan & Tilt System.
- Two 4D Systems microCAM Serial JPEG Camera Module - RS232.
- Phidget Infrared Temperature sensor.
- Phidget ambient temperature, humidity, light, sound and atmospheric pressure sensors.
- Phidget Spatial 333 sensor.
- Maxbotix XL-MaxSonar-WRA1 Weather Resistant Ultrasonic Range Finder.
- MaxBotix EZ1 Ultrasonic distance sensor.
- Sharp IR Range Sensors
- U-Blox 5 GPS.
- Anyvolt3 DC-DC converter.
- Parallax Emic 2 Text-to-Speech Module.
- Many more parts.
The processor will run Windows 7 and the programs written in C# with Visual Studio 2010. The robot will be semi-autonomous, reporting back to a home base PC in my house via the internet. After receiving a task to perform from the home base, it is to perform the task on its own.
Thats the plan, it will be a fun project.

Chassis with the main platform mounted.

Sharp infrared distance sensors are secondary collision avoidance sensors. EX1 will first scan the area with an ultrasonic sensor before moving. If the ultrasonic sensor missed an object, hopefully these sensors will detect the obstacle before the rover runs into it.

Sharp infrared sensor looks down at the front of the rover. Its purpose is to detect cliffs (stairs) before the rover falls over the edge.

Mounting the electrial components on the underside of the main platform. The scales are to ensure the robot weight is balanced evenly.

First assembly of the major components. The cameras and other sensors are not mounted on the forward pan & tilt yet. The payload rating for the Dagu chassis is 5kg, I have 5250 grams mounted, so it's a little overweight and I have not done the wiring yet. There are things I can do to lighten it up, so I'm not worried yet.

It is incredible how small this motherboard is!
Currently I am attempting to install Windows 7 but I am not getting any video from the VGA port. Perhaps it comes from the factory defaulted to the mini HDMI port? Not much information is available from the VIA website. I don't have the correct HDMI cable so tomorrow I'll have to find one and try this again.
2014/05/16 - Motherboard DOA
Sadly I suspect that the VIA P910-10Q motherboard is DOA. No matter what I try I can't get anything out of it. Power light turns on, fan turns... that's it. So I guess I will try contacting VIA and see whats up. In the meantime I will proceed with wiring this guy up.
2014/05/25 - Motherboard NOT DOA
I spent more time trying to get the VIA P910-10Q to run, I even disconnected everything except the monitor, so no hard drive, no memory, no keyboard, etc... that will always get a BIOS message on the screen but still nothing. So I thought, man that's one small motherboard! Maybe there is no onboard video ram at all, maybe it is all shared ram. So I robbed a memory stick from my laptop and plugged that in.... victory! Now it is booting up. Turns out it didn't like the new 8GB ram stick and since it needed the ram to display video, it had no way to tell me it didn't like it. So now it is running with 4GB ram and I'll need to find a 8GB stick that it likes.
Now the EX1 Mobile Platform has the PICO-ITX with Windows 7 Pro 64-Bit installed and all updates. Added a BlueTooth dongle, Apple BlueTooth keyboard, wireless WiFi and small amplified speaker. Somewhere I have a BlueTooth mouse, so then everything can be done wirelessly with the mobile playform (except plugging in a monitor). Under normal operation of course there will be no keyboard, mouse or monitor connected.
The Windows performance test scores are:
- Processor 3.6
- Memory 4.9
- Desktop graphics 3.5
- Gaming graphics 5.4
- Hard drive 7.6
So a good weekend for me, I don't have a dead processor and I can proceed.
2014/09/22 - Modified rear platform mount
Its been four months since my last update. Since it was motorcycle season, not much work was done on EX1, but now that summer is fading away I can spend more time again on this project.

It was annoying and time consuming to constantly disconnect and remove the top platform to access the electronics. So I modified the rear mount to be a hinge and added the support bar to keep the platform tilted up when I am working on it. Now it's a simple process to remove two screws and tilt the platform up, leaving all wires and electronics connected. This will work much better for test and debug of EX1.
Now I am working on the power distribution wiring. The switch located above the center wheel in the above photo is the battery disconnect switch.
2015/02/21 - 50 Day Run Test
Not much physical changes to EX1, the latest work has been on software. So far development has been on the sensor suite, storing that information, transmission to home base and receiving commands from home base. One discovery, my onboard batteries are insufficent to power the rover, so I need to rethink my power system. For now, it is running off an external power supply via a jack at the rear of EX1.
This user interface is for me to test methods of interfacing with sensors and devices, and to get my program debugged. By connecting a monitor, keyboard and mouse to EX1 I can use it like any PC computer. The final version of the remote platform software will not use an interface like this.
EX1 just completed a 50-day continueous run while I was working out of the country, recording and transmitting back to my laptop its twenty-six sensor readings. During this time it never stopped working, even though one sensor did drop out, the rover continued to report back the other sensor readings. Over 100 million sensor readings were transmitted back to me via the internet.
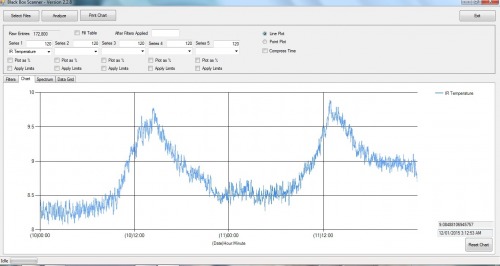
Using another program I wrote I can then analyse the sensor data. The screenshot above shows the outside air temperature for January 10-11, 2015.
I can also send a text file to EX1 from my laptop via the internet. The file can contain commands that EX1 will recognise and execute. The current command set is limited, I was mainly developing the method of issuing commands to EX1. I was able to give the rover commands even though I was a half a world away.
My next step now is to start developing a new program from the ground up for the remote platform, moving away from a U.I. based system and making it a completely autonoumous rover that can take commands remotely.
This guy is curious and will explore its surroundings. Equipped with GPS, compass, cameras, ultrasonic sensors, infrared distance sensors, sound, light, pressure, temperature, humidity.... it wants to explore.