



El Primero
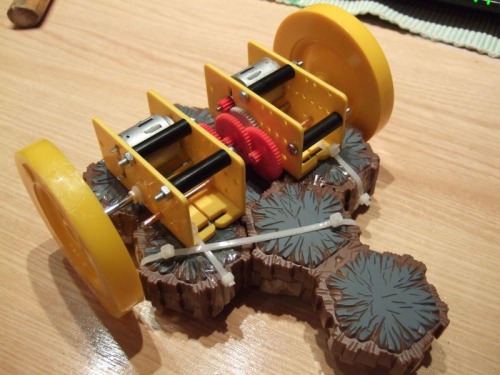
Behold the first of many robots to come - my LMR. It is using Picaxe 28X1, SRF05 & motors/gears from Picaxe store. These motors & gears (available at http://194.201.138.187/epages/Store.storefront/?ObjectPath=/Shops/Store.TechSupplies/Products/GBX015) offer several gear ratios, and are very easy to assemble. You can get the wheels from the same place (but no tyres). The gears are quite noisy - in a spark of brilliance I have put several drops of machine oil on them in order to lessen the noise. However, the noise remained the same and my robot started spitting oil all around the place like 20-year old Golf. Kids, don't do this at home.
The biggest challenge so far was to build an appropriate chassis. For the time being, I have settled with using parts from a boardgame, which I have tied together with double-sided tape & zip ties. One unintentional benefit of the use of zip ties was that I got a simple suspension as well - several ties are joined together to increase their length, and by placing the joints on the bottom side of the chassis (which is hollow), sudden up & down jerks are being absorbed nicely.
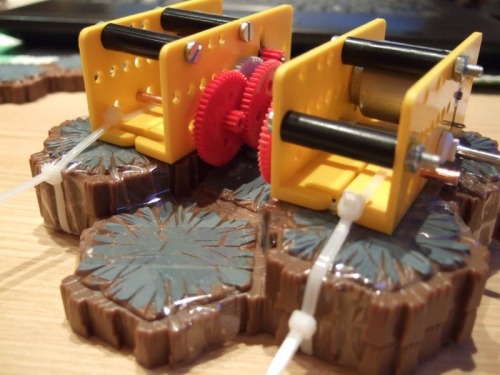
Another minor annoyance with these gears is that they sit outside of yellow box, so I had to make a platform for the gearbox to give gears enough space to turn freely. Although the easiest solution would be to place the gears next to the wheels, and not on the opposite side of the gearbox.
Regarding the programming, most of the problems were related to SRF05 not sending out pulses in some situations. The cause seems to be the servo, and setting it to low after each command improved things considerably. The servo is using the same power source as the microcontroller, and it is somehow interfering with SRF05 signals. This problem will probably go away after adding another power source for the servo & motors and/or adding filtering capacitors to the setup.
The next steps are to mount additional sensors (light detector, bumper switches, microphone) and outputs (laser pointer on another servo, lights, speaker...). Stay tuned for El Primero MkII.
Big thanks to fritsl for the superb tutorials :) They are a great source of ideas, and, more importantly, encouragement to take the first step in building robots.
Navigates using ultrasound
- Actuators / output devices: 2 motors, one servo
- CPU: Picaxe 28x1
- Power source: 4 AA cells
- Sensors / input devices: SRF05 Ultrasound