



DuiBot1(8servo) && RYU(12servo)
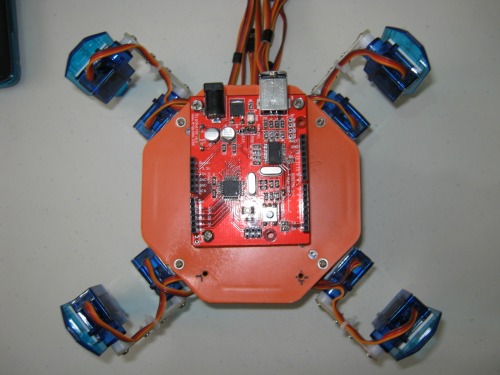
Ok. This is an upgrade(control) for my 8 servo 4 legged walker... now its using an arduino328 clone. Currently, its still remote controlled via hacked cheap R/C car rx/tx electronics... more to add: if remote control is not used, will go to autonomous mode, using either IR sensor or ultrasound sensor.
currently, it only has 2 walking gaits (im still researching) and finding a *cool* walking gait :)
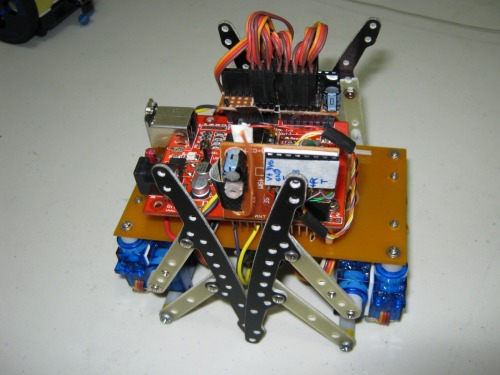
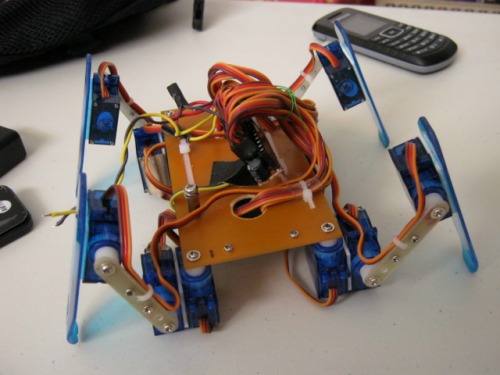
here it is shown, rest mode... RF reciever clearly shown.
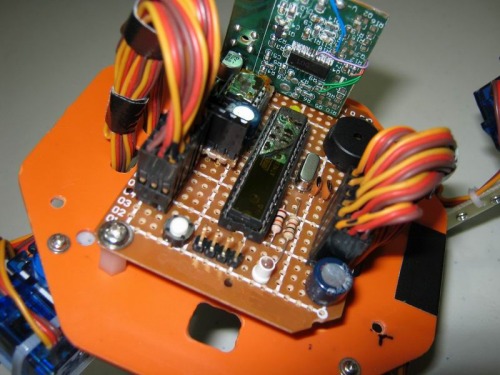
here is a clearer shot of the RF receiver
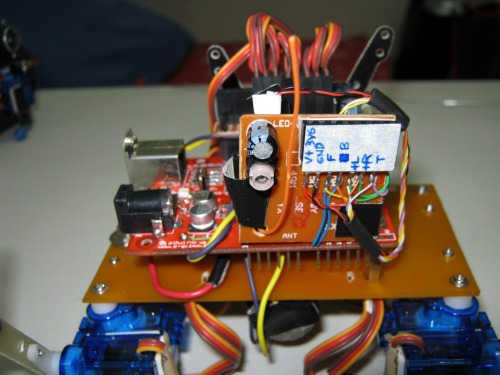
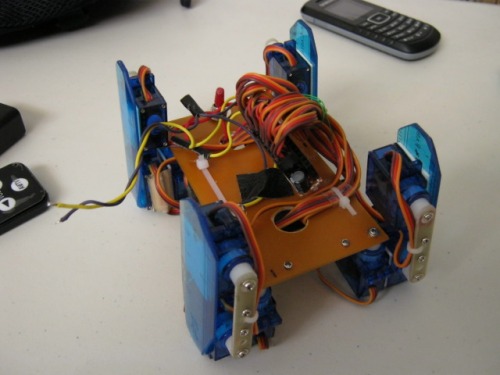
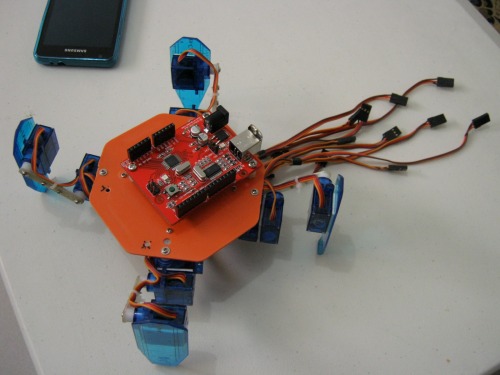
the connections to the arduino, the tiny board next to it, the DC-DC aka mintyboost :) to power the arduino board (5V)...sorry the RF receiver is only taped. hehe

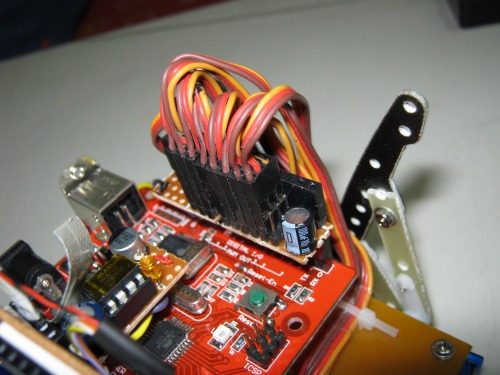
now for the servo connections, had to cut out a protoPCB strip..
now, the power source..3.6V 1300mA Li-ion Battery..

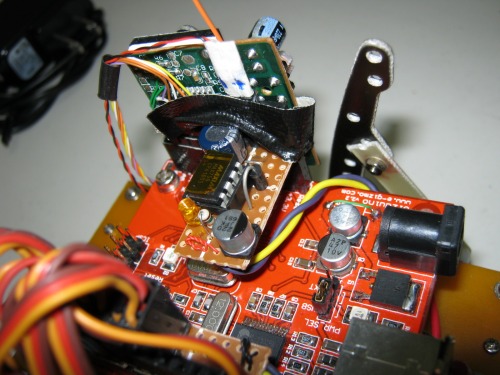
another view at the DC-DC power supply.. had to REALLY make sure it worked.. power goes directly to the 5V supply lines of the duino board, bypassing the 5V regulator! XD
more work (and coding) needs to be done here... the RF remote has 5 channels in it..Im still thinking WHAT to do with the last one, since its not being used .... maybe if I press that, it will do a DEMO mode.. another thing in my mind, if not remote controlled, will enter autonomous mode and walk forward/avoid obstacles.. but im still thinking what sensor to use here... :)
video... just a short teaser.. more to come eventually.... goodnight everyone(its about 10pm here)
=================2nd UPDATE MARCH 08,2012============================================
RECENT GOAL: program a *cool* walking gait
NEW GOAL: convert this 8 servo walker to a 12 servo
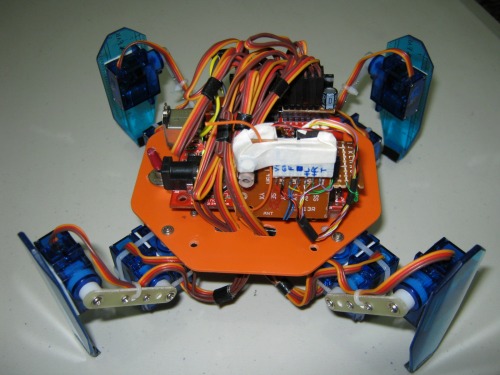
well... I have here a bunch of scrap "legs" from an existing dismantled 6 legged walker (18 servos), given by a store owner who also laser-cuts acrylic plastic sheets.. so I used them temporarily, to see if my -idea- both hardware & software works, AND IT DID! yay! :D ..... check out the 2nd video.. currently, the remaining 3 legs are "detached" at the moment... though seeing it move, seems like there is JUST? a little difference (walking = mechanically) as compared to using 8 servos... hmmmmm and hmmmmmmm
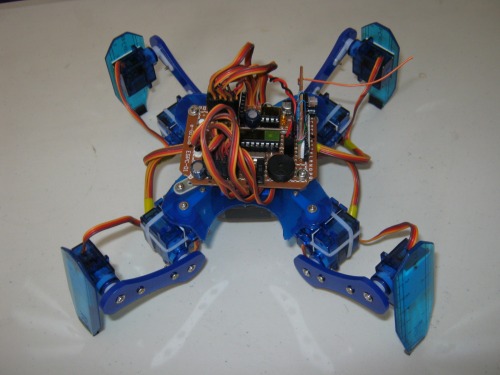
OK..here shown when legs are folded... better position than the other one..big difference (I admit)
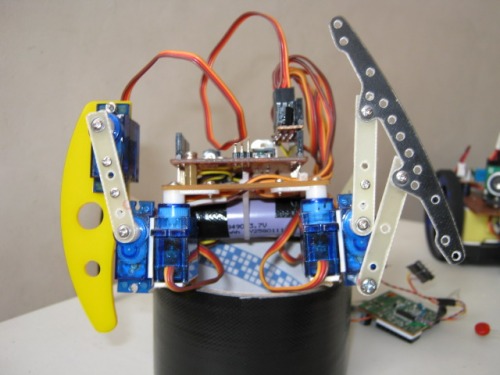
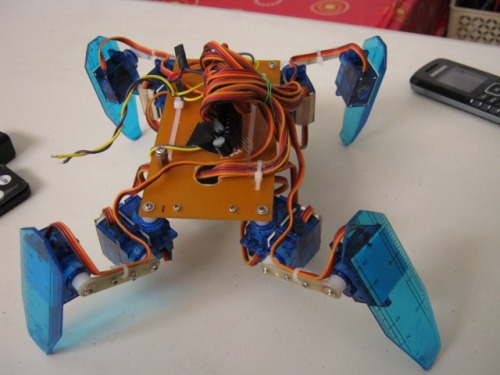
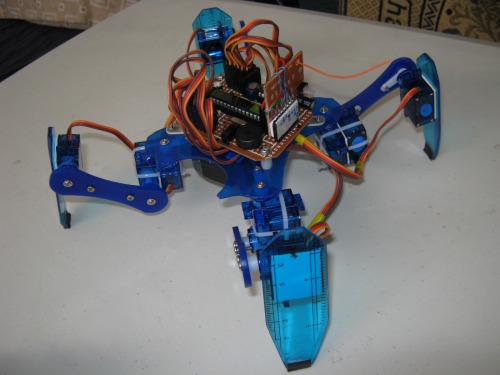
and HERE, in its normal walking position.. not much of a difference as compared to the other, eh?
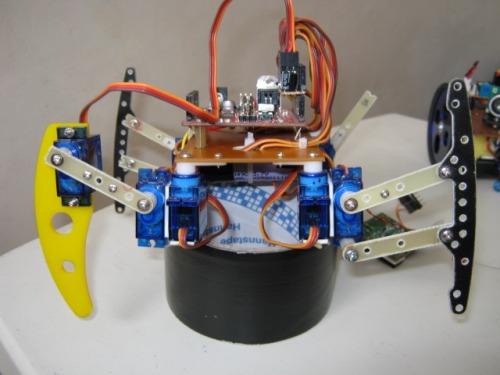
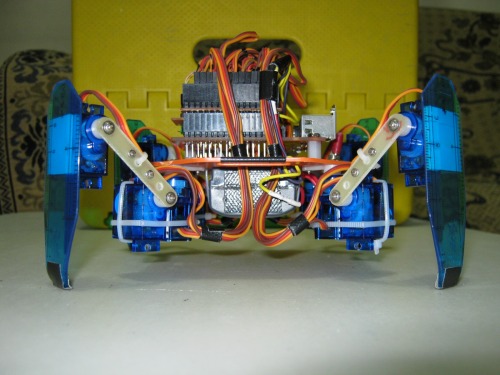
BUT.. can it do THIS? leg stretching? I dont think so.. LOL XD (hey no offense to the 8 servo walkers out there) :) so this is what makes the big difference (and more power too from battery) .....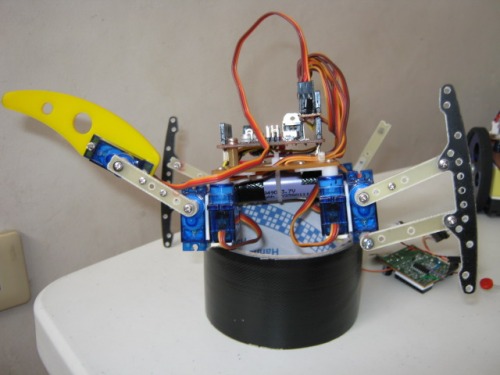
again, till next time! :=)
==========================3rd UPDATE===============whew :) =====================
I need MORE CURRENT from the battery..so added another one.. so that means bot is much heavier than before.. PLUS the additional 4 servos.. woooo
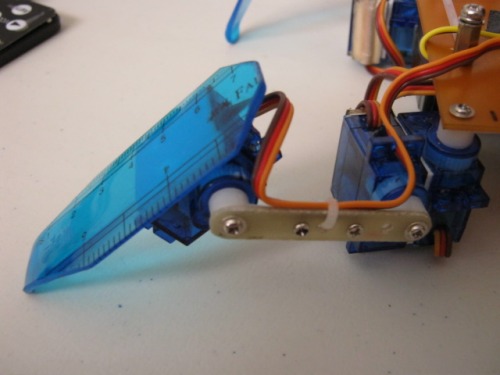
close up view of the leg... yup its a plastic rule :=D .... liked the color! lol.. back supports? hmm maybe next time..
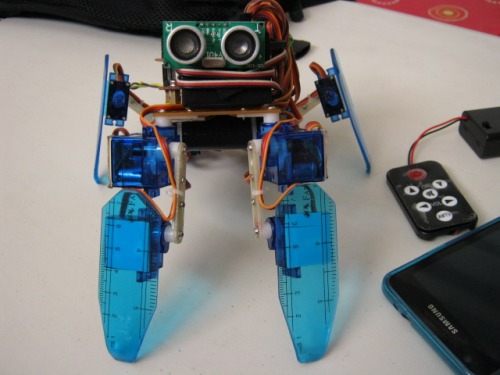
here he is, sitting.. and a mock-up of its head(sonar + servo)... :)
and yes its walking already (running actually).. I had to remove the duino board so I could add some more *gimmik* stuff.. sound/remote/sensors etc... so again, stay tuned !
==============UPDATE APR 11 , 2012===== new hardware=========================
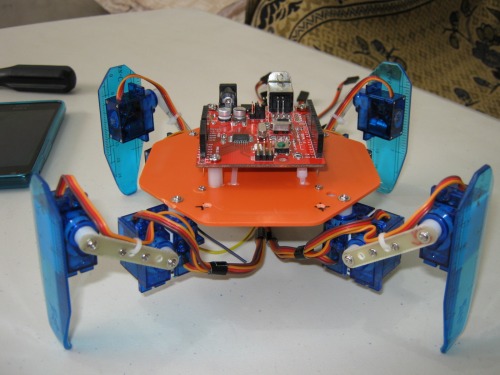
ok, new chassis.. its from an electric ulitity box cover... this makes the weight distribution more balanced...
ok folks.. thats all for now :) cheers!
==================UPDATE UPDATE UPDATE :D ============================================
Ok I now name IT "RYU"... thats final :-) bye duiBOT :_(

here shown the RF "module" taken from a cheap R/C toy...
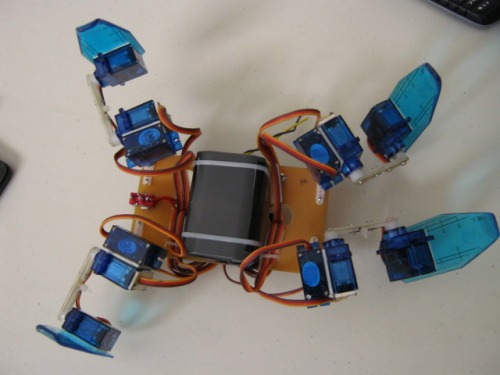
ihow high it is, relative to ground...I like it low profile... :)
I really like this configuration... it can go (N)orth (E)ast (W)est (S)outh and rotate...
check out the video(WILL UPLOAD LATER).. its finally UP..whew :)
==========small update===========================APR 15==================================
removed the arduino clone board, bought a blank 328-PU, bootlloaded it and made a new board just for this walker...
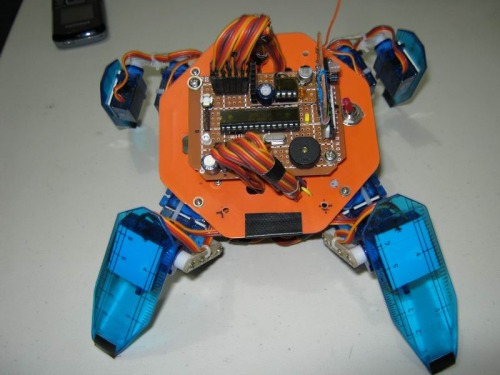
the "programming pins" shown.. +5/Tx/Rx/GND(dot)....next update, replace the ORANGE chassis.. :D
======UPDATE UPDATE UPDATE april 20, 2012============================================
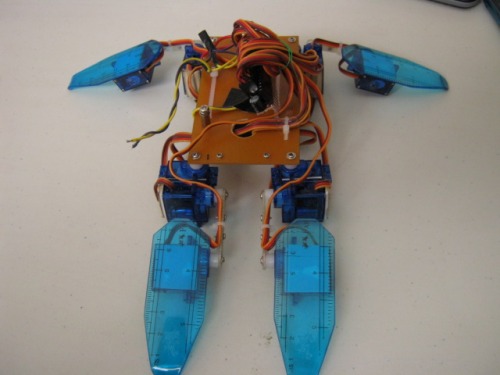
ok, just some minor mechanical updates.. made the legs a bit longer.. using blue acrylic plastic.. and changed the base color also to blue... :)
next update, maybe this will be an autonomous one, remove the remote control and add sensor switches at the feet + accellerometer, so that body will be parallel to ground.... :)
--------update april 21, 2012-------------
just a minor update.. I got me here a master/slave UART BT..just did some "echo" tests using virtual com port,and its all good :) *will* replace the RF module im currently using, so this means I could free up some more I/O pins..

Im using a breadboarded atmega328 duino, so Im planning to "tap" on the rx/tx pins, only other thing is, when I upload a sketch, I have to remove this module :).. and with this setup, I think I could use the PC virtual terminal as my remote control for this bot...have not done this yet, its still in my mind atm :D next path: move on to using an android phone as my controller :) <next for learning, making android app>
4 legged, can be remote controlled or autonomous
- Actuators / output devices: 8pcs 9g servos
- Control method: RF remote / autonomous
- Power source: 3.6V Li-Ion
- Programming language: Arduino C
- Sensors / input devices: none at the moment
- Target environment: indoors mainly