



DRAGON-the very old rescue robot
guys,let me introduce this old robot i made long time ago!
DRAGON! a simple line follower robot which supposed to find the dolls through the path and take some videos by a wireless cam and save it in comp so i consider its sorta rescuebot!lol
the best thing i enjoy is giving a good look to my robots.each of them have their own characte and name.
anyway...
MECHANICS-ELECTRONICS:
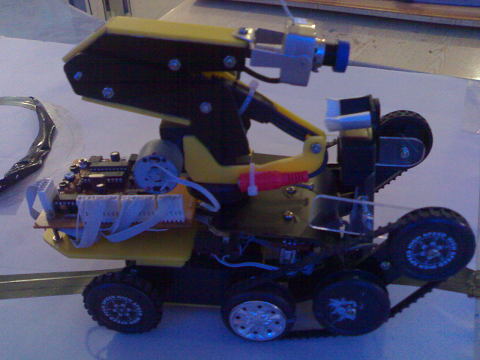
since it was a rescuebot i the choosed tank system in front.and the cam should be able to take a close look so i added an arm (neck) to make it move.
at first day,it was like this:



and then i tried so hard to make the best weight division (wich i failed) and bla bla...
the dc gear-motors i used were so weak and i dont even want to remember them again!!!
at the next step it turned into this(it looks like army robots!hahah):
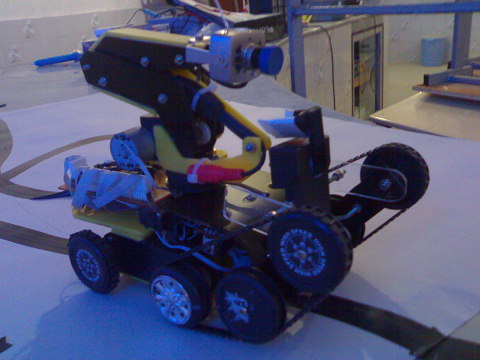
i had a hard time making the IR distance measuring sensor work!!and to make it worse,the processor was AT89C51!!!(seriously old stuff were sucha pain).though it worked afterall phew...
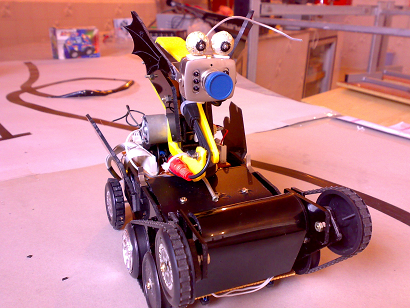
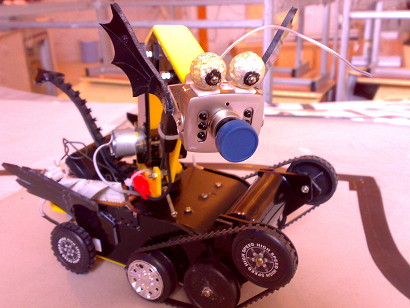
final look!!it became dragon:

_____________________________________________________________________________________________________________
i dont have the source anymore since it was for ages ago.and the circuit schematic doesnt worth to be redraw!lol
i put this here just to share the idea!=)
more info?ask!
line follower,live cam,using as a rescuebot
- Actuators / output devices: 4x dc gear motors
- Control method: autonomous
- CPU: AT89C51
- Power source: 6x AA cells
- Programming language: Assembler
- Sensors / input devices: IR, LDRs, Two contact switches, Wireless Camera
- Target environment: Indoor or outdoor