



DOC
Update 05/06/2012
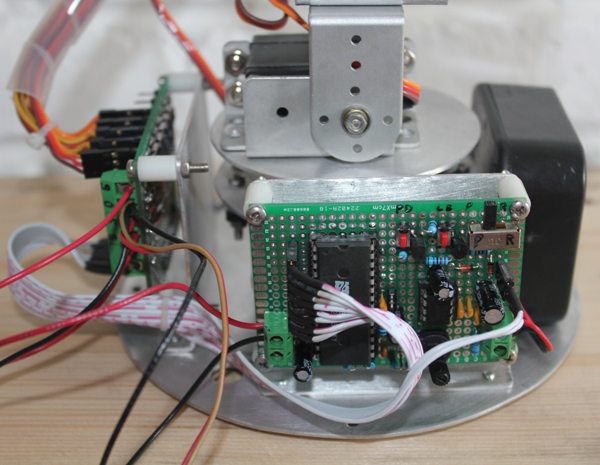
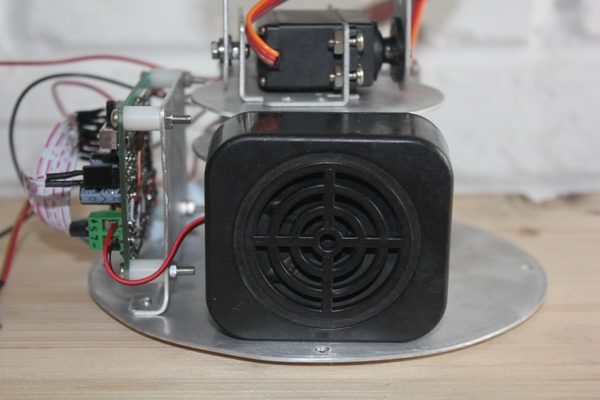
Voice recorder board finished and assembled. The loudspeaker (0.5 W/8Ω) is from an old toy, came in nicely in a small plastic box, which covers the speaker and improve the sound (soundbox). Some basic programming done, see video DOC_0002.
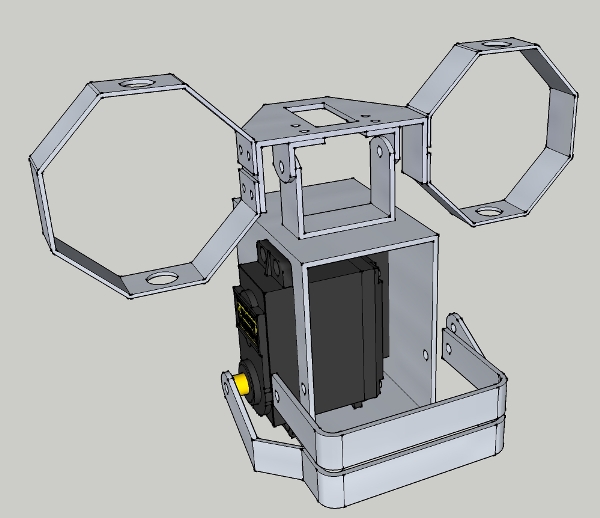
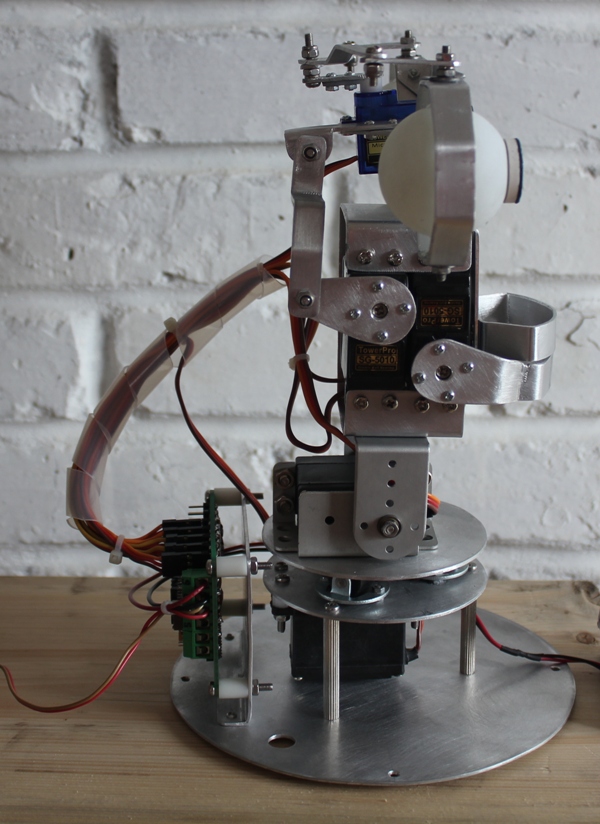
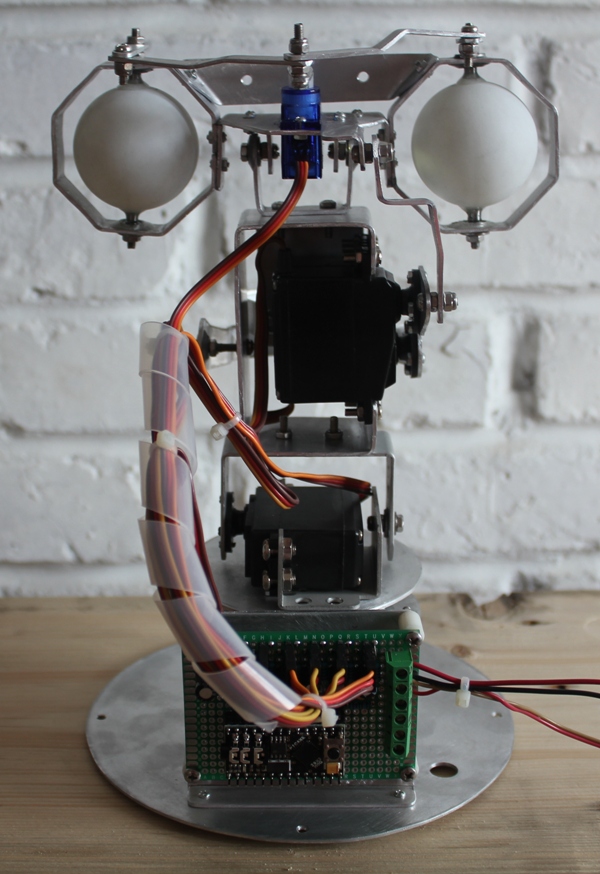
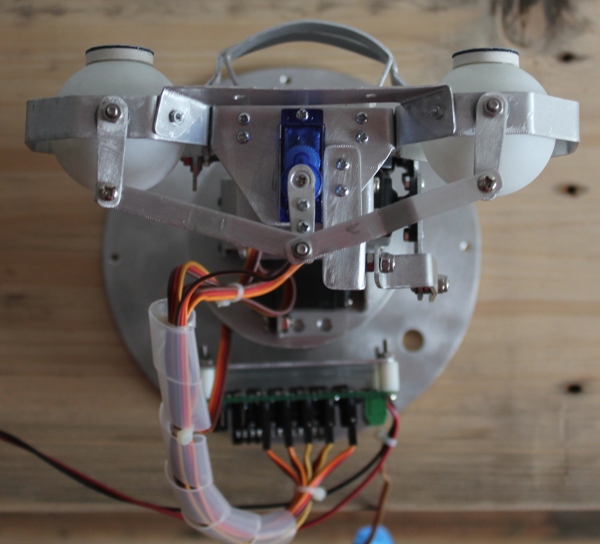
This is one of my projects, I wanted to share with you before I am going to holiday. Inspiration for the robot was the DRK8080 from Doctor robot, hence the name DOC. So far I have finished the 5 DOF robot head. The head was partly designed with Google Sketchup, mainly to avoid faults in construction. I can only recommand this, even your robot is much simpler from the mechanical point of view. Tools and materials I have used:
- Cordless drill/various metal drills
- Cordless Dremel clone with various tools
- File
- Sanding paper (various grain sizes)
- Tin snips
- Several pliers
- Steel rule
- Try square
- Circle
- Scissors
- Squared timber (to bend the aluminium)
- Clamps
- Mini tubing cutter
- Propyl alcohol (for cleaning)
- Aluminium sheet, thickness 1 and 1.5 mm
- M3/M2 screws and nuts, washers and snap rings
- Ø 8 x 3 mm bearings (supplied usually with C-servo-brackets)
- Common servo-C-bracket
- Servo mounting bracket
- Tiny casters for the pan unit
- 2-component epoxy glue (for the eyes and holding the bearings in place)
- Super glue (to fix components before drilling and secure nuts on moving connections)
- Table tennis balls (for the eyes)
- 1 Tower Pro SG-90
- 2 Tower Pro SG-5010
- 2 Tower Pro MG-995
- Plastic tube, outer diameter equal to the pupils diameter
- Ø 3 x 4 mm stainless steel tube
- Color print/carton/transparent duct tape for the pupils
- Plastic and metal spacers, various sizes

Roams around, seeking for humans, tries to interact with them
- Actuators / output devices: LEDs, loudspeaker, LCD, 5 DOF robot head, 2 continuous rotation servos (Tower Pro MG-995)
- Control method: autonomous
- CPU: Several Picaxe 28X2 modules
- Operating system: Windows 7
- Power source: 7.4V/4800 mAh Li-Po
- Programming language: Picaxe basic
- Sensors / input devices: Sharp IR, microphone, accelerometer, PING, PIR, touch sensors
- Target environment: indoors