



Differential NXT robot
Ok after a loooong time not being active on this page I figured that I had to post another NXT robot.
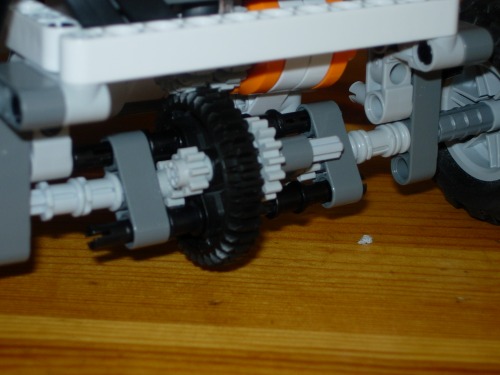
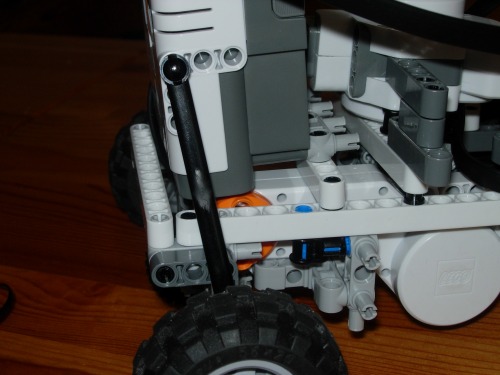
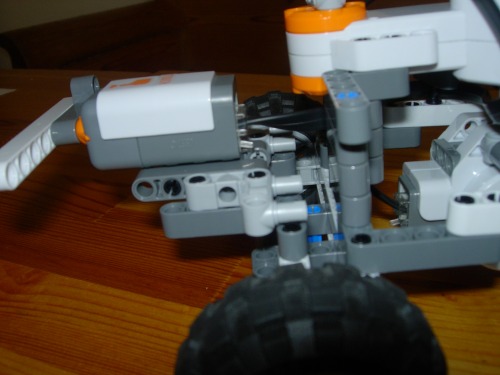
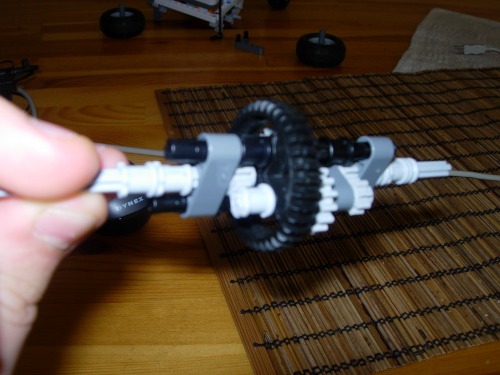
Ok, this is my first robot with a differential, so don't complain over the strain you can see in the pictures.

Alot of strain here!!





I will try to post a video here soon.
Navigate around in a room very bad,
- Actuators / output devices: 2 NXT Motors
- Control method: autonomous, Bluetooth
- CPU: Lego Mindstorms
- Operating system: Windows vista
- Power source: 6 AA batteries
- Programming language: C#, RobotC
- Sensors / input devices: NXT ultrasonic sensor, NXT touch sensor
- Target environment: indoors