



Desk Bot

Still a work in progress.
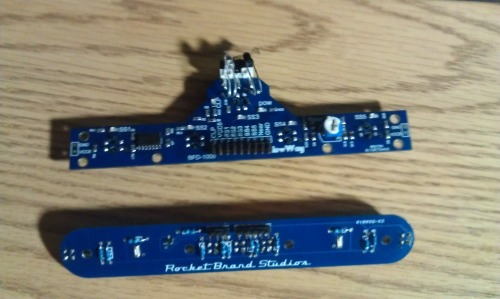
When finished it will roam around my desktop at the office. Currently need to fabricate a bracket for the sensor array in the front. I am still deciding on two sensors arrays Robot 7-way Multi Tracking Sensor from http://Yourdunio.com or Line Follow sensor bar from http://rocketbrandstudios.com/. The Robot 7-Way would be ideal because of the bumper switch. Problem is that I would have to turn a few sensors off because of the limitation on the Arduino Micro Magician. Will probably use the thick plastic to build the bracket. Have tried a few variations but they didn't hold up well.
I plan on moving the batteries in front of the gears and motors after adding a solar panel; to the top. Still researching the correct setup to not charge the batteries till they are low. Have been able to create a diode setup so that the battery doesn't drain when the solar panel isn't charging(in the dark)..
Have had problems getting the program to accept IR over sensors. When I wok\rk ti out the robot will sense an IR command and stop autonomous activity until 5 minutes after last remote entry. Will also stop the robot to sleep for 5 to 60 minutes and operate for 2 to 10 minutes so it isn't always moving.
Will update as I finish up different pieces.
- Actuators / output devices: Tamiya gears and tracks Tanmiya Universal Plate * 2
- Control method: Auto and IR Remote
- CPU: Arduino Micro Magician
- Power source: 4 AAA Rechargeable Batteries
- Sensors / input devices: Bumper Switch and IR/Robot 7-way Multi Tracking Sensor fromYourdunio.com/or Line Follow sensor bar from http://rocketbrandstudios.com/
- Target environment: Indoors Desktop