



Delta Robot
Homemade delta robot. It uses an Arduino as a servo/relay controller. Data is transferred over serial port from a homebrewed Qt application to the Arduino. I use cheap Hitec HS-311 servos, they are not very accurate, and at some point i would like to upgrade them, and maybe put some encoders on there to improve the accuracy.
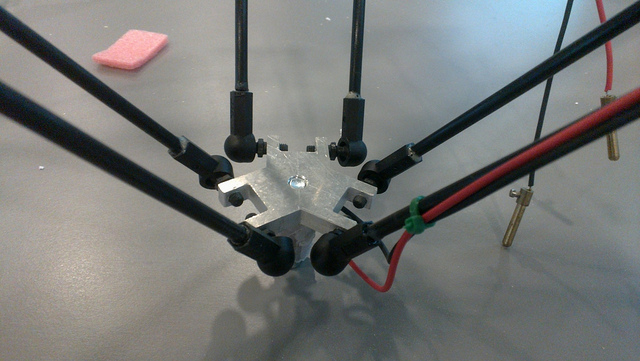
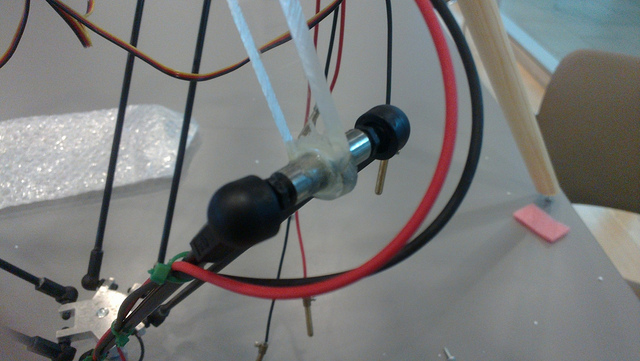
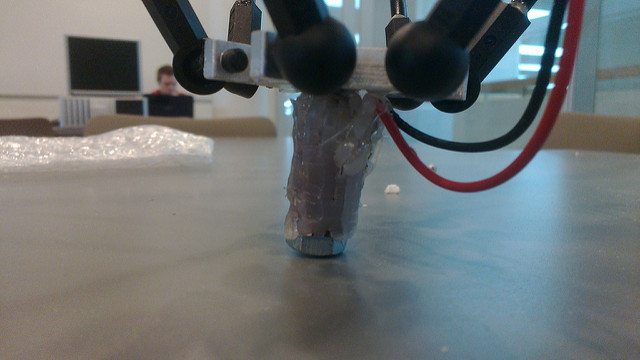
The end effector is laser cut from 8mm aluminium. The angle joints are Igus WGRM-05 LC, and the rods are carbon fiber rods from an old kite. The electromagnet at the bottom is wound from 0,3mm magnet wire around a 8mm bolt (It would be a lot better to use soft iron but...), and is surrounded by hot glue. The electromagnet is controlled by a cheap 5V PCB relay.
The base is made from 19mm MDF, a pretty bad material but very cheap.
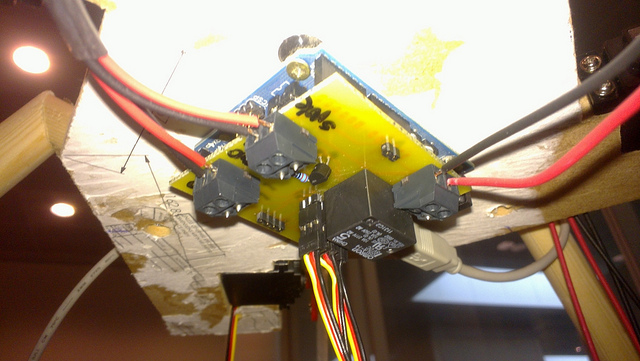
The PCB is fairly simple. I use the PWM ports from the arduino, but drive the servos with an external power supply. The relay is a G5LA (cheap). The PCB is made as a shield to reduce the number of wires.
The plan is to use a Raspberry Pi when/if it arrives and some kind of image processing, possibly OpenCV.
An my "not exactly bug-free" software (Sorry for those not speaking Danish)
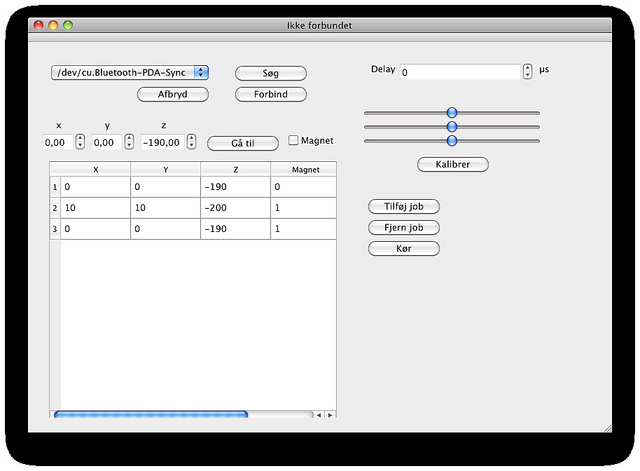
Move around in space
- Actuators / output devices: Servos
- Control method: Serial Port
- CPU: Arduino Duemilanove
- Operating system: Mac OS X
- Programming language: C++, Arduino