



Delta bot
Hallo everybody, this is my first LMR entry (not the first robot I build)
I made this delta robot over the weekend.
About two week ago i saw a video of an industrial delta robot and i was intrigued by the simplicity of the principle but the complexity of the movements it could make.
So i thought, I'm gonna make one.
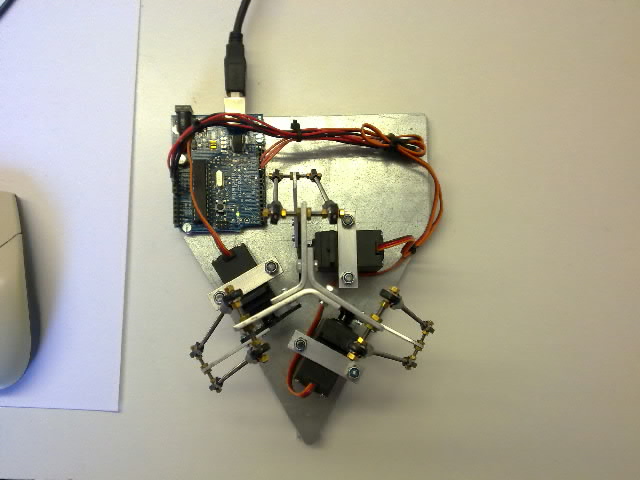
So i bought three servos some ball joints and some aluminum strip.
The metal base plate I had laying around. Just as some some nuts and bolts.
I used an arduino i took out of another robot i build (i will post that one here two)
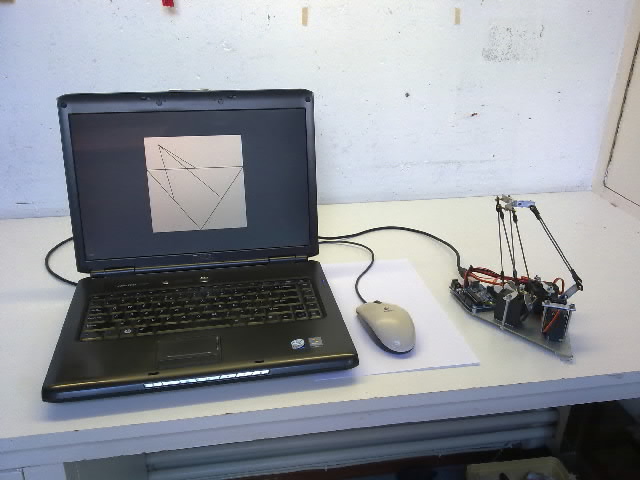
I programmed the arduino so it reads serial data, and I made a mouse interface that sends the serial data.
And in actually turned out to be as simple as I thought it to be.
But now I have a delta bot I should do something with it.
I'm not quite sure what.
I had the idea to make more of these and use them as lags for a two, four or six legged robot.
It will work well I think, but it's a bit expansive to make six of these.
Delta bot and it's interface
Top view
Delta Bot

Copy mouse movement (for now)
- Actuators / output devices: 3 servo's
- Control method: mouse
- CPU: Arduino Decimila
- Operating system: windows XP
- Power source: USB, servo's by arduino
- Programming language: Arduino, Processing (java)