



DellBot
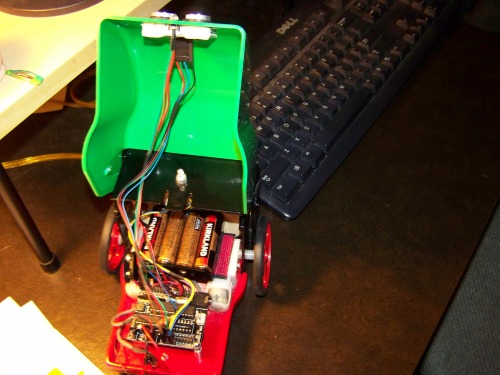
Here is my second robot based on Picaxe 28X1 board (Start Here format), designed on a chassis that was actually an air duct from the cooling system of an old desktop computer's microprocessor.
The Base
I was thinking about making the base from plastic, but instead, balsa wood was the best option because it's very cheap and super easy to work with. Glue and paint make the material stronger. After shaping and sanding to give it a smooth surface finish, I painted it with spray paint. The back is also a piece of balsa wood attached with miniature screws to the housing's tabs, which look like they were made specially for this robot.
Pieces and more parts
In addition to two GM9 motors, two solarbotics wheels and the SRF05 sensor, I used the excellent 1/2" Pololu ball caster that gave it the finishing touches and enough stability.
What was recycled

Air duct with a fan housing attached that is part of the CPU cooling system

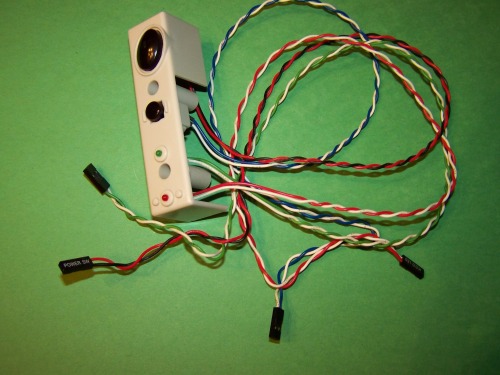
Delving into the old computer, I also found very flexible wire with connectors ready for use, LEDs, switches, standoff, screws, etc. What a great selection of parts!
Some more details

To hold the SRF05 in place, I used a couple of o-rings in the front and...
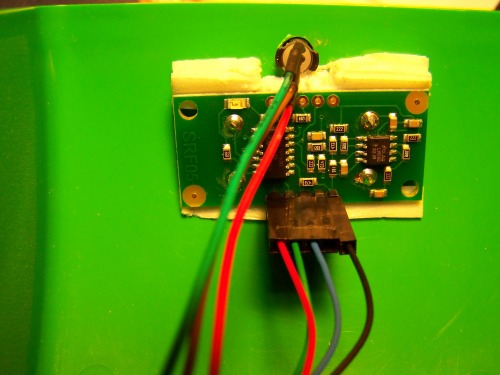
...double-sided tape at the back. To straighten the SRF05 I used several layers of this tape on the bottom and just one layer on top. Also you can see the nose that is a three color LED.

After uploading its' program.
- Control method: autonomous
- CPU: Picaxe 28x1
- Operating system: Picaxe Basic.
- Power source: 4 AA batteries
- Programming language: Basic
- Sensors / input devices: SRF05
- Target environment: indoor on smooth surfaces