



DC#01
About this project
This project was created to go to a new home.
Ok, let me explain...
... about one year ago I've met a guy through the web who was interested on my MDi #3. Now (actually about 3 months ago) we talked again and we ended up deciding that I would produce for him a version slightly smaller and simpler of MDi #3.
I've started with a cardboard prototype to have a good perspective of how it would look and to have the approval of the interested.
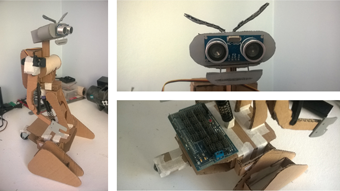
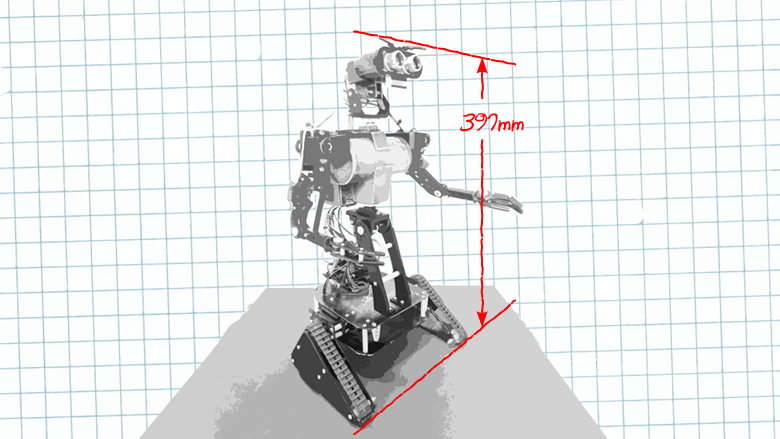
Between the design and final tests passed about three months... and here is!
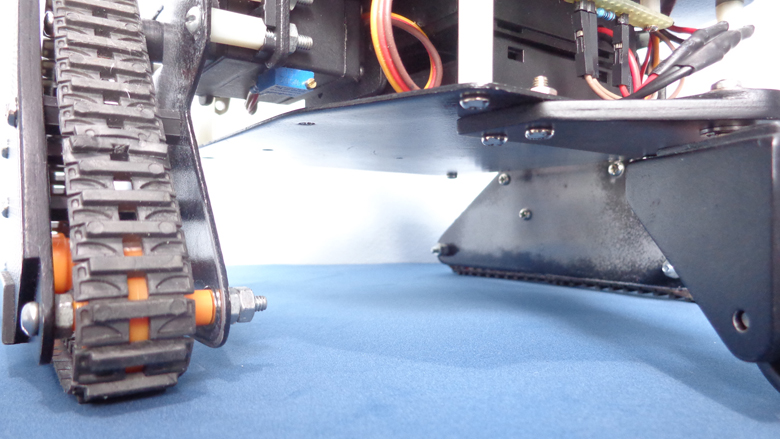
The manufacturing process was the same as always using polystyrene sheets and PVC pipes. If someone did not follow my previous projects and is interested in the method can see this walkthrough: Plastic handling to make DIY robotic parts. Just for the internal bracket of tracks and for the chassis was used aluminum.

Electronics, mechanics and others
The power supply for the servo motors is provided by two packs of 4XAA NiHM batteries, so we have 5000 mAh @ 4.8V. The Arduino board uses a 9V battery.
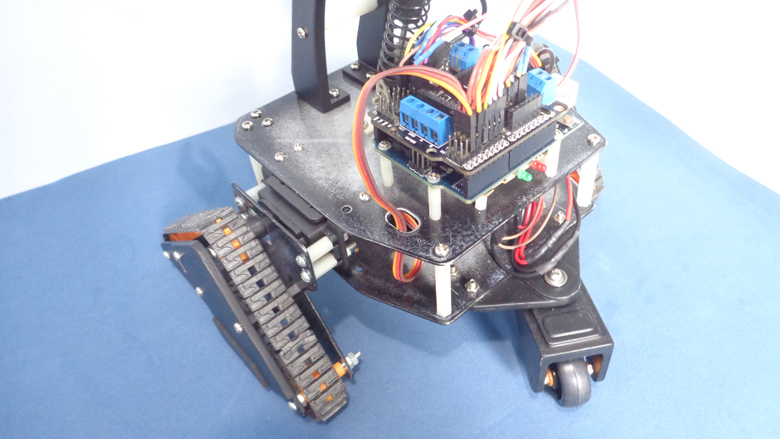
The board used is an Arduino UNO with a DFRobot IO Expansion Shield v5.
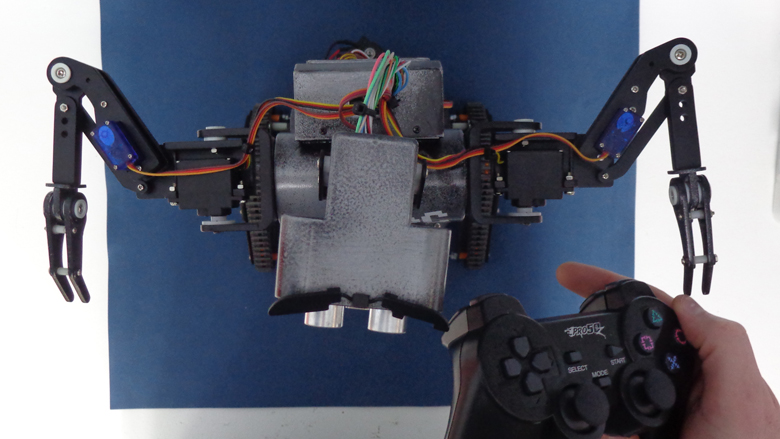
The remote controlled routine is provided by a wireless PlayStation 2 controller.
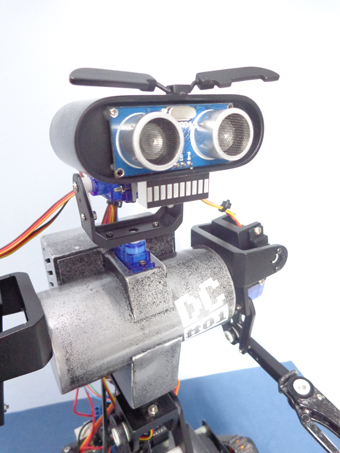
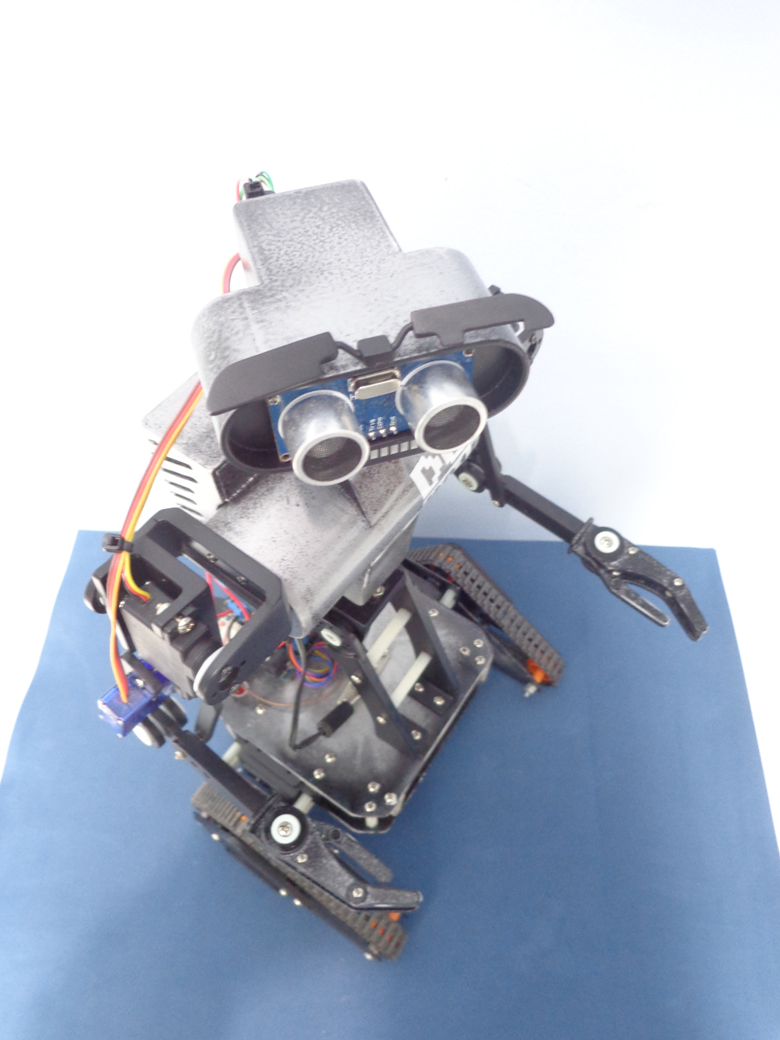
For the autonomous routine (simple obstacle avoidance) it uses a HC-SR04 ultrasonic sensor. The robot run autonomously if no command is given with the remote controller.

On the back will be placed a speaker.
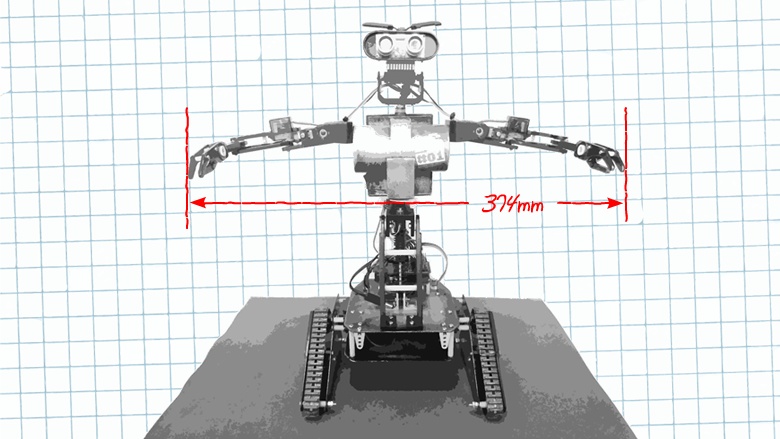
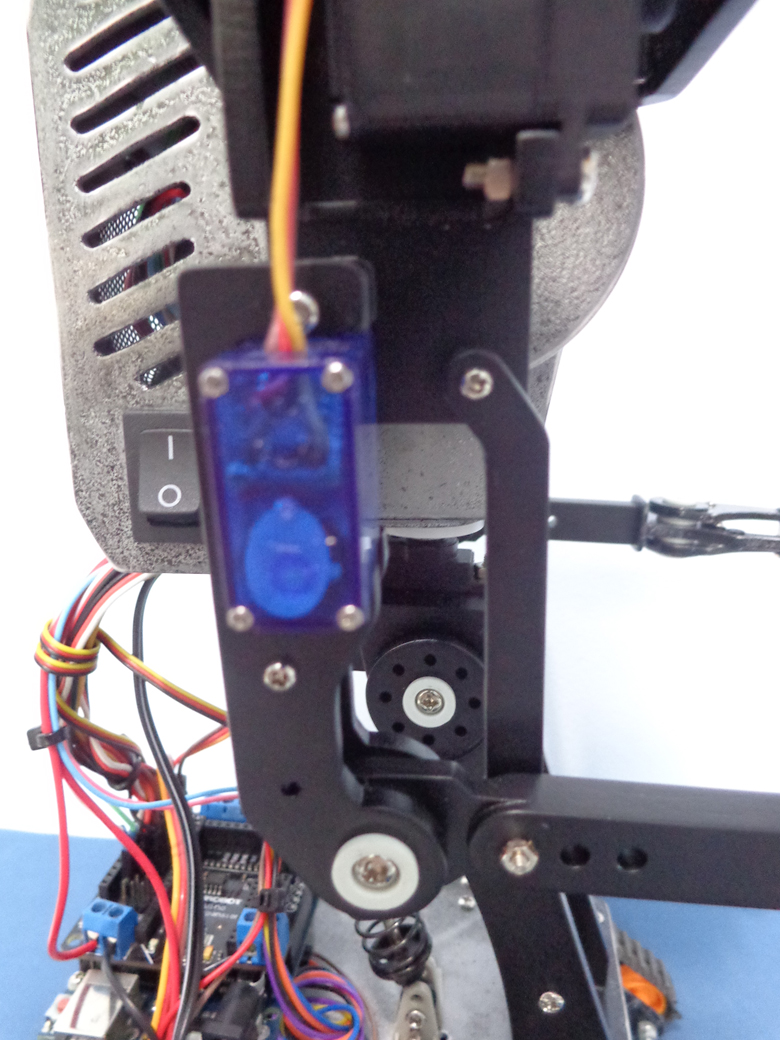
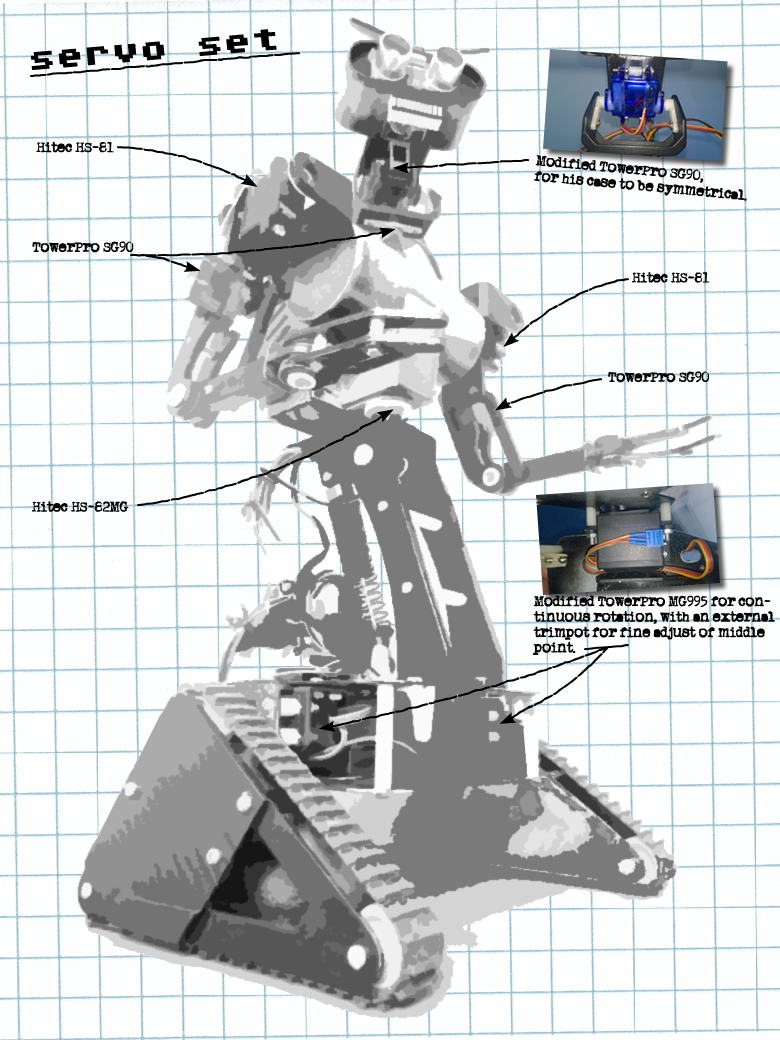
To keep the project simple, the amount of servo motors has been limited. But not to lose in functionality, some solutions have been created.
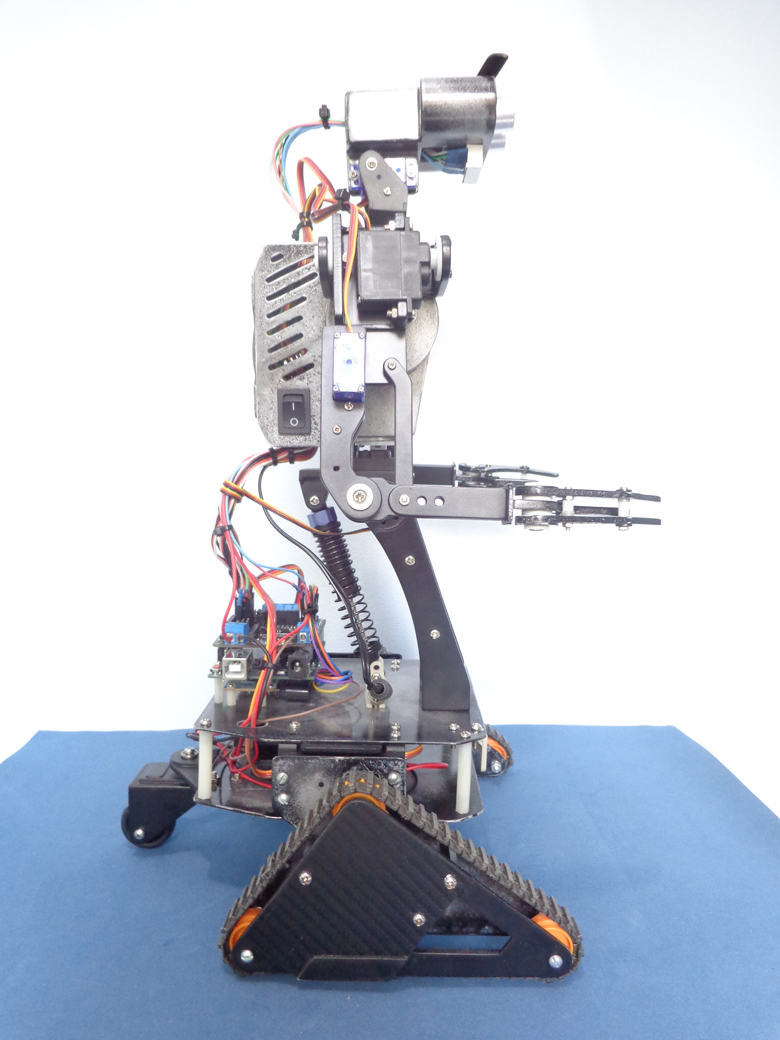
For a more interesting movement, the arm uses PLM (parallel linkage mechanism), instead of a servo motor in the elbow to the moves up and down.
Arm with PLM.
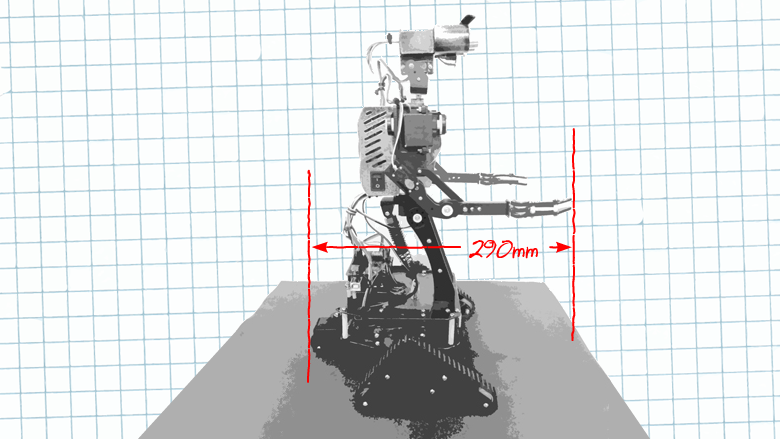
As this project should be simple, and with a limited number of pins (Arduino UNO), needed an alternative to DC motors. So I've used two MG995 adapted for continuous rotation. They are a bit slow for this function, but certainly have a lot of strength.
To give functionality to the hands without using servo motors, a small spring was used to make the hand close, thus being able to hold light objects.


UPDATE @ August 7, 2015
More of the same... just a few extra pics.
Navigate around via ultrasonic (simple obstacle avoidance) and remote controlled.