


"Dave" - the Differentially Driven Two Wheeled Robot
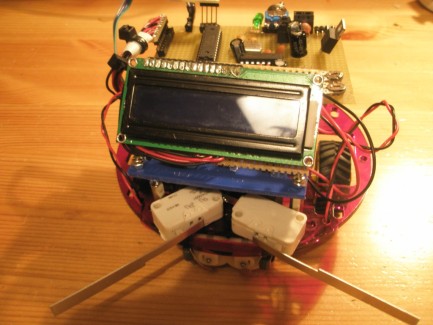
I have attached some images of my first robot. It is built around a pololu round chassis, tamiya twin motor gearbox, and tamiya off road wheels along with a ball caster (also made by tamiya). There is a second deck made from some blue HIPS, and it runs off of 4 AAs and a 9v battery. The "brains" are simply an atmega8 and an L293d along with supporting circuitry. I aim to make this into a sumo and line following robot, however I wanted baseline electronics, chassis and control code to start with. The control software is written in C along with avr studio and winavr, at the moment it has two modes - autonomous with input via two NO switches, and an I2C interface with a nunchuck for wired remote control. I had originally used a Bit bashed SPI interface with a Dualshock controller, however the extra buttons, code space and I/O pins required for this made switching to the Nunchuck an easy decision. The control algorithms and software structure for this project are very simple at the moment:
[semi-pseudo code]
Print Select Mode to LCD
If Right Switch && Left Switch are pressed
Wait 2 Seconds
If Right Switch && Left Switch are still pressed
Enter into Mode1
Else enter Mode2
Mode1: (remote control)
Initiate I2C interface with nunchuck
Read relevant analog and button data
Process button data and output to forward, backward and turning motors
Go to Mode 1
Mode2: (autonomous)
Go forward
If left switch is pressed && right switch isn't
Turn right
If right switch is pressed && left isnt
Turn left
if right switch && left switch are pressed
Reverse
Go to Mode2
I have attached some pictures of the current robot, and I hope to update when I have the line following and edge detection worked out..





Navigate Around Obstacles, Remote Controlled via Nunchuck
- Actuators / output devices: Tamiya Twin Motor Gearbox
- CPU: atMega8
- Programming language: C (AVR GCC)
- Target environment: indoor