



Cyclops
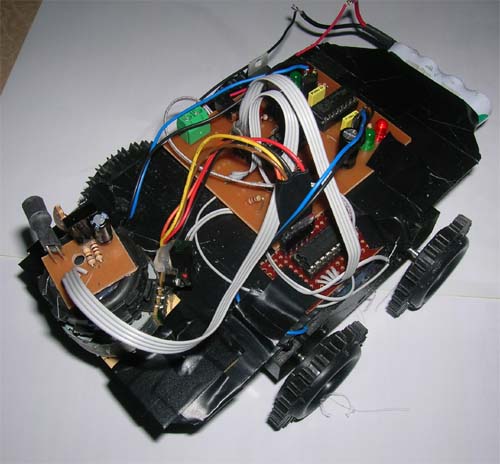 Cyclops is a obstacle avoider robot with one obstacle detector. This obstacle detector is prepared with an IR led and IR receiving module. To detect the obstacle all around the robot the obstacle detector was mounted on a stepper motor. The stepper motor comb the surroundig of robot by turning clockwise and counterclockwise.
Cyclops is a obstacle avoider robot with one obstacle detector. This obstacle detector is prepared with an IR led and IR receiving module. To detect the obstacle all around the robot the obstacle detector was mounted on a stepper motor. The stepper motor comb the surroundig of robot by turning clockwise and counterclockwise.
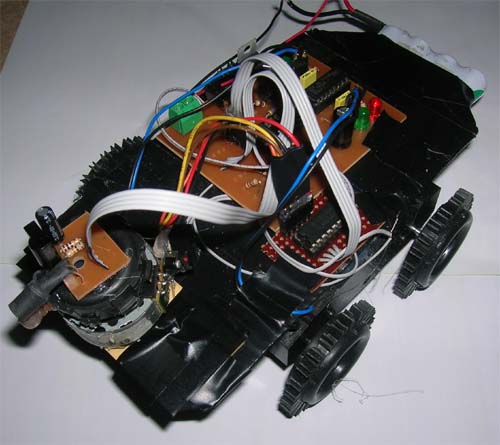
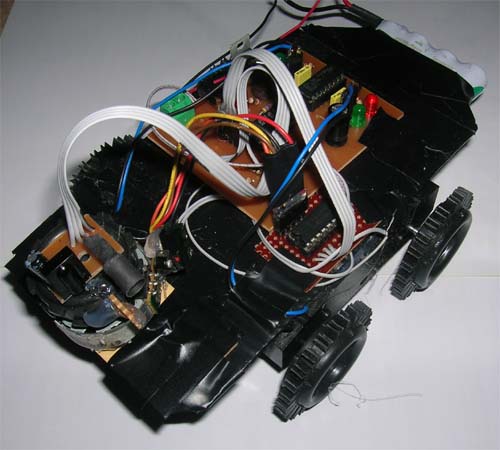
The stepper motor is controlled with ULN2003, and to control the dc motors a L293D motor driver IC was used. The main circuit of Cyclops is controlled with PIC16F628A.
you can watch Cyclops in action by this video
http://www.robotiksistem.com/engelyeni.rar
The sensor ad stepper motor motion can be watched on this link
http://www.robotiksistem.com/hsensor.rar
To see my other robot projects you can visit
avoids from obstacles
- Actuators / output devices: 2 dc motors, a stepper motor
- Control method: fully autonomous
- CPU: pic16f628a
- Target environment: indoor