


Cybernetic ant
Hello respected! Wanted will share with you our "project". (Excuse for transfer, I translate from Russian) 1.
THE DESCRIPTION Use of original technological decisions will allow any beginning to collect a robotics cybernetic ant capable to run for a small lamp beam, to bypass obstacles. But there is more to come! The cybernetic ant can be modified as in the designer to add various functions. For assemblage of the robot printed-circuit board manufacturing is not required, its case is executed from. A cardboard! And nevertheless it extraordinary прочен that is reached for the effect account многослойности and non-standard fixing elements. Thus all radio components are easily soldered and strongly kept on the positions!
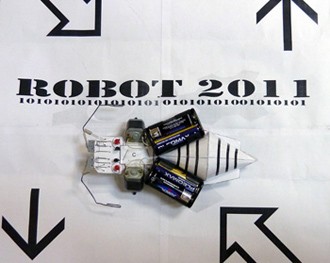
Фото.1. A cybernetic ant in assemblage.
Фото.2. Фото.3. A cybernetic ant on a working surface.
2. VIDEO OF WORK OF THE CYBERNETIC ANT
On video.1[YouTube] movement to a static (motionless) light source. http://www.youtube.com/watch?v=cbajdtDSQW4&feature=player_embedded- On video.2.[YouTube] Obstacle overcoming, work of tactile gauges. http://www.youtube.com/watch?v=Hy09tIVbFEE&feature=player_embedded
- On video.3[YouTube] movement behind a dynamic (moving) light source. http://www.youtube.com/watch?v=h_z6ZAAfcPQ&feature=player_embedded
Comment on video if you will not complicate. =)
3. CHARACTERISTICS AND FUNCTIONALITY.
1. Microswitches with a metal strip.
2. Phototransistors FT-2K.
3. Blinking light-emitting diode ARL5013-URC-B.
4. Field transistors KP505A.
5. Штеккер switchings of modes.
6. A decorative armour.
7. Two-section cases for batteries "AA".
8. Motors QX-FF-130-14230.
9. A protector.
10. Blinking light-emitting diode ARL5013-URC-B.
11. A tactile moustache.
Feature of "a cybernetic ant" in that that in its scheme the quantity of radio components is used minimum. The electric scheme contains only two phototransistors, two transistors, two diodes and two light-emitting diodes. The robot is capable to move behind a light source, maneuvering precisely to move to a static light source, to overcome obstacles реверсированием shaft of engines.
The algorithm of movement to light is simple. If the light source on the right the right phototransistor and the robot is more strongly shined turns to the right. If the light source at the left the left phototransistor and the robot is more strongly shined turns to the left. As a rule in the standard scheme, for change of a direction of rotation of shaft of engines use the transistor bridge. In the scheme of the robot-ant the problem is solved by introduction of the bipolar power supply.
4. THE WORK PRINCIPLE.
The electric scheme is presented on fig. 1. Initial position of jumper-crosspiece JP1 defines a mode in which the robot will function. If the jumper to be in position "Step" shown on the scheme the robot will bypass obstacles. If jumper JP1 is in the family way "Photo" the robot will move towards a light source.
Let's consider a situation when jumper JP1 will be in position "Step" under the scheme. Two compound batteries GB1 and GB2 are included consistently. In a point of their connection concerning the top and bottom potentials of batteries there will be a relative zero potential. Both motors are connected to this zero potential by the left conclusions under the scheme. It means that changing a potential sign on free (right under the scheme) conclusions of motors M1, M2 it is possible to change a direction of rotation of shaft of any of engines independently.
After inclusion of food SA1 through diodes VD1, VD2 on shutters of field transistors VT3, VT4 the positive potential arrives. Transistors open in this potential and resistance of the channel a drain-source becomes minimum. Simultaneously to conclusions of 3 microswitches SF1, SF2 the negative potential which passes through normally closed contacts 1, to the left conclusions under the scheme of both 1 motors M1, M2 arrives. As the right conclusions under the scheme of both motors are connected to плюсовому to battery GB2 conclusion, their shaft start to rotate. The robot goes forward.
Microswitches SF1, SF2 carry out a role of gauges of a contact. When on a robot way there is a subject works will admit microswitch SF1. Thus its metal plate transfers effort to a rod and a conclusion 1 is disconnected with a conclusion 3 and further becomes isolated with a conclusion 2. On left under the scheme motor M2 conclusion will arrive positive potential from battery GB1. And the right conclusion of the motor is already connected to this battery on "minus". The sign on left under the scheme motor M2 conclusion has exchanged. Too has occurred on the right conclusion of motor M2. Motor M2 shaft means starts to rotate in an opposite direction. It leads to that the robot concerning with a tactile moustache of a subject starts to turn, simultaneously leaving from an obstacle. The part of the scheme with microswitch SF2 and motor M1 similarly works, only turn will be in other party.
If to translate jumper JP1 in position "Photo", the positive potential will cease to arrive through diodes VD1, VD2 on shutters of transistors vT3, VT4. The robot will be capable to move behind a light source. The light source is perceived by means of phototransistors VT1, VT2 which are included to consistently blinking light-emitting diodes HL1, HL2. We will admit a directional light gets on phototransistor VT1. High sensitivity of the phototransistor to a light source is caused by a condition when the blinking light-emitting diode is switched off. Thus resistance between a shutter and a source of the transistor the big. Therefore on its emitter of phototransistor VT1 and consequently and on a shutter of field transistor VT3 there is a positive potential. This potential opens transistor VT3. Resistance of the channel transistor VT3 drain-source will sharply decrease also negative potential will arrive through normally closed contacts of 3 and 1 microswitch SF2 on the left conclusion of motor M1. Motor M1 will appear connected through transistor VT3 channel to batteries GB2 and its shaft will start moving. But motor M1 shaft will rotate until then while blinking light-emitting diode HL1 is in the switched off condition. As soon as light-emitting diode HL1 will be switched and "will be lighted" through it the current will begin to flow, on the anode of light-emitting diode HL1 there will be a power failure. The potential on transistor VT3 shutter will sharply go down to level at which this transistor will be closed. Resistance of the channel of transistor VT3 will sharply increase, and the current flowing through motor M1 on the contrary will decrease to zero. Motor M1 shaft will cease to rotate. Then blinking light-emitting diode HL1 again will go out and under condition of illumination of a window of phototransistor VT1, transistor VT3 will open again starting motor M1. So process will cyclically repeat that will be expressed in alternate inclusion and motor deenergizing.
As the electric scheme of the robot consists of two identical parts the second part on phototransistor VT2, light-emitting diode HL2, transistor VT4 will work similarly. At illumination only one phototransistor the robot will turn towards a light source, at illumination of both phototransistors the robot will move behind a light source as "инсектоид".
5. DETAILS AND MATERIALS.
The case is made of a two-layer cardboard. The list of radio components is resulted in table 1. As the power supply it is used four elements of a standard size "AA" with pressure of 1,5 volts. On power supply positions establish two cases calculated under batteries of the specified standard size. 1N4148 it is possible to replace diodes of import manufacture on domestic КД522 or КД521. High loading ability of transistors KP505A allows to connect almost all kinds of low-voltage engines used in children's toys or before the got.
6. THE STEP-BY-STEP INSTRUCTION OF ASSEMBLAGE OF THE ROBOT.
For successful assemblage precisely follow instructions. Robot assemblage is carried out on a template which needs to be printed about what it will be told further.
- 1. http://www.servodroid.ru/publ/blog_droid_39_a/sborka_robotetekhnicheskikh_konstrukcij_vsekh_urovnej_slozhnosti/kiberneticheskij_muravej/20-1-0-47
- 2. http://www.servodroid.ru/publ/blog_droid_39_a/sborka_robotetekhnicheskikh_konstrukcij_vsekh_urovnej_slozhnosti/kiberneticheskij_muravej_chast_2/20-1-0-48
- 3. http://www.servodroid.ru/publ/blog_droid_39_a/sborka_robotetekhnicheskikh_konstrukcij_vsekh_urovnej_slozhnosti/kiberneticheskij_muravej_chast_3/20-1-0-51
Thanks for your attention!
The material is kindly given by a site http://www.ServoDroid.ru
Copying of materials without the permission of the author is forbidden!
BEAM-robot