



CYBERlite Robotics Project - 0001 -> WALL E
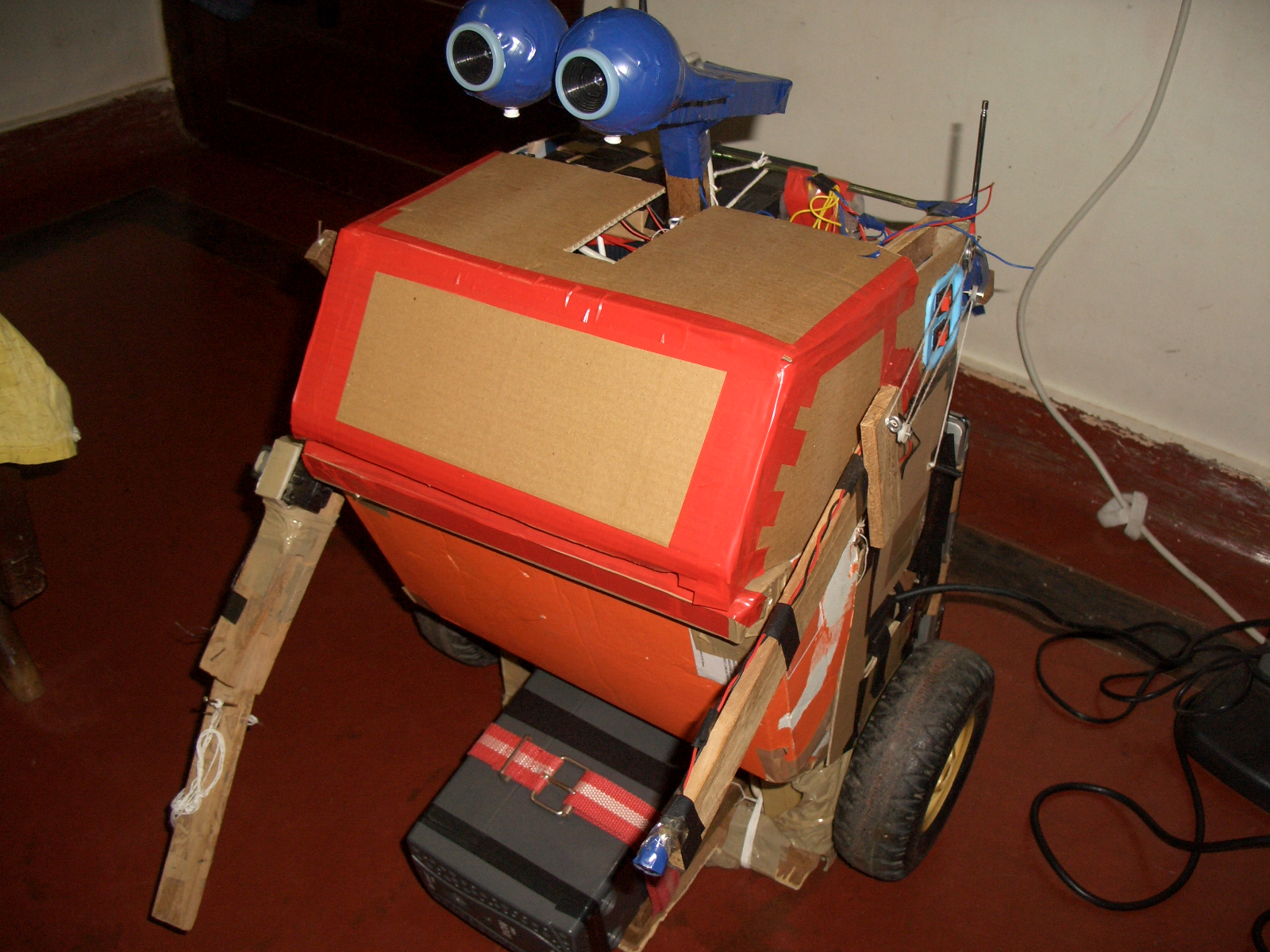
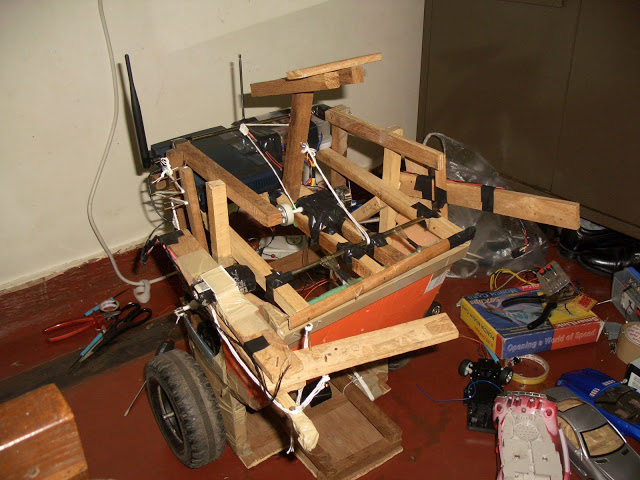
This is acctually my first robot. I know that I had to start small but as I just passed GRADE 10 and I'm studying for IIT, I wouldn't have any time to do another robot till I finish college. So here it is! WALL E
It has 1 6V 1A servo for driving, a simple motor servo for steering, and so on for right shoulder, right arm, fingers, left shoulder, compression hatch and camera tilt.
When it's complete, it'll be covered and i'll post a few more pics and videos. It'll also have 2 eues ( 2 cameras and using the 3D Analygragh software, WALL-E would be seeing in 3D. The allows him to calculated distances from objects. He has my old TOSHIBA A80 laptop as his processor with Intel Pentium 1.6 GHz and a 2 GB RAM Memory. The laptop is connected through ethernet port to a ZyXEL Wireless ROUTER which is wirelessly connected to my new LAPTOP. I use Windows Remote Desktop Connection to control the laptop inside WALL E from mine. In the laptop insode WALL E, 4 of the 8 servos are connected thrugh parallel port and uses L293D as the motor driver. 2 otherservos are controlled through the Router and PIC 16f628a and finally the last 2 through my new laptops parallel ports.
He uses Logitech Quickcam as his eyes.
There is also a iton UPS that powers the router and my old laptop(as it's batteries are screwed up)
My dad gave me a max budget of $ 200 for this project by I exceeded it as I gave it more features. The TSOP sensors receive ir rays from ir leds connected to ic 555 circuit. The tsop inputs mu comp through serial port.
Wireless mic is on his in which the receivcer is connected to my laptop.
WALL-E is usually controlled through the ZyXEL gateway router but I also put a usb female port on him. There, I can plug in a TATA Photon + to connect him to he internet.This means that using TEAM VIEWER, I can controll him from anywhere in the WORLD!
The voice activation is done through MATLAB.
here is also another mic that is direcrtly connected to the laptop insoide WALL EI also has autonomous mode where it can navigate through my house. I also used VPL in Microsoft Robotics Developer studio.
He also uses a facerecognition software to understand and learn all the people he sees. Then through QBasic, he reacts to it by going near someone he knowsor shaking hands with them.
I promise I'll give a complete explanation on his as he' finished.
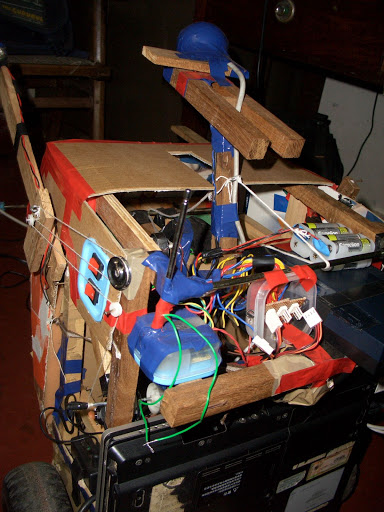
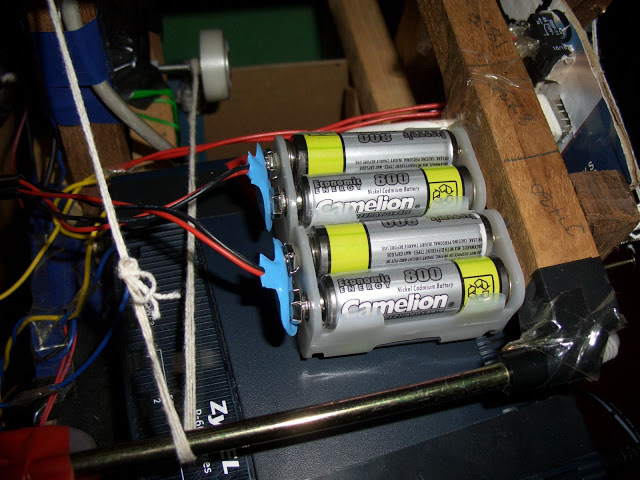
The following are the new pics taken when the second EYE ( Logitech QuickCam ) is installed. A battery pack holder is also made!




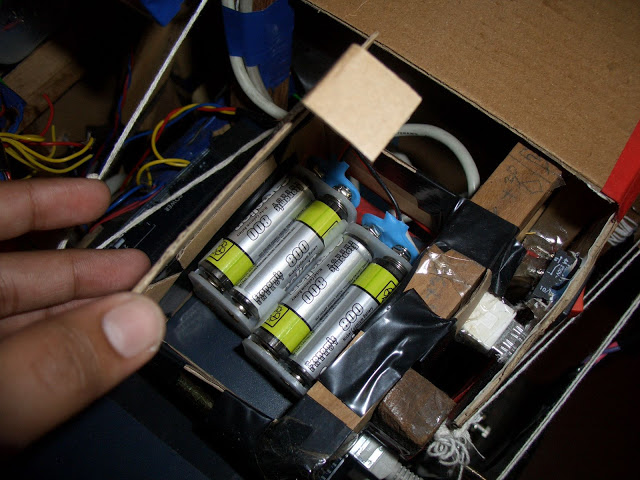
Cover is not complete and I can't do it without finishing the insides. I've ordered for 2 L293Ds and will only come day after tomorrow so after the work, I'll put some pics of him completely covered.
The second cam is also not ready







Move around, controlled through Remote Desktop Connection, 27 MHz R/c controller, 2.4 GHz ZyXEL Roouter to serial port to PIC 16F628a, Voice activated and uses TSOP sensors to navigate it's way. It also records voice and Camera inputs.
- Actuators / output devices: totally 8 servos, 1 laser LED and 1 bright flashlight
- Control method: undefined
- CPU: Intel Pentium, PIC 16f628a
- Operating system: Microsoft Windows XP
- Power source: 9.6 V of AA rechargeable, 230 volts iTon UPS.
- Programming language: MATLAB, QBasic, VPL
- Sensors / input devices: camera, TSOP Sensor, Wireless microphone
- Target environment: indoor flat surfaces