


CrEp4E the object avoidance buzzing & blinking theremin robot :). With Update !!! Bump Switches are functional
Hello to all, this is my first lmr added project, i've build robot in arduino ide, it's verry simple code, i've made this robot from scrap as you can see i found my old dvd's and i wanted to throw them away in the garbage, so i thought my self what can i do with them if i recycle them so i wanted to build a cd/dvd coaster bot i found some lds, my arduino board and some resistors and some secretary machine box and i took from there some bump switches and i got some plastic laying around so i wen't to near electronics shop and bought blank pcb and l293d motor controller, and terminal blocks, so i made a pcb layout in circuit wizard pc program and asked my dad for some rechargable bateries, he said that we've had in our weekend village house, and i found a 2AA battery pack with litle switch and than i bought a 9V battery to power the arduino board. After 3 weeks i've build my first microcontroller based robot. it was navigating with bump switches. i almost forgot i've got the motors for the robot from a rc car which i bought from my near mall about 600 denars i bought 2 of these rc cars. After all i was doing this in the end of the 3th high school year, and i didn't have much time to make more esthetic, So when my school year ended i wanted to rebuild and to add ultrasonic sensor for better navigation and some leds and a speaker, so i've done that. The robot works, but i want to make the bump switches functional with the ultrasonic sensor together. So if some one can help me about this problem it would be very great and i'll be very thankful. so here is the video of my first robot with bump switches, link: http://www.youtube.com/watch?v=VQovABdRbh4 down in the description is the code for the robot and pcb layout for the motor controller board that i'am using on the both robots the new and the old one. The codes are simple but i don't know how to combine them :). And Big THANKS TO HACKLAB KIKA THE FIRST HACKER SPACE IN MACEDONIA for borowing the srf05 ultrasonic distance sensor.
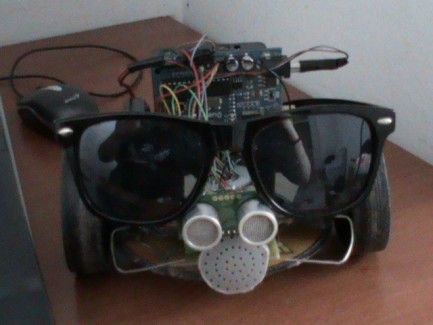
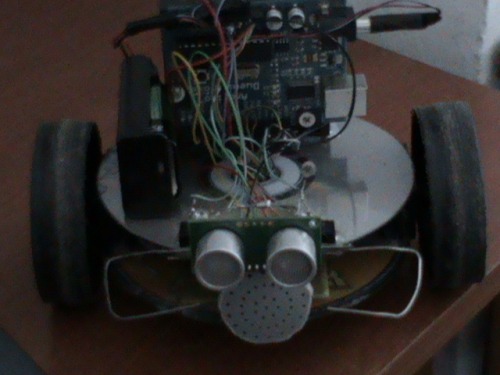
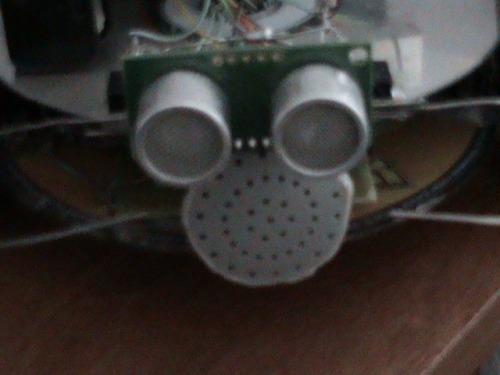
Here are some images


final update od the code: http://pastebin.com/Ckya95be
It acts as a theremin instrument and avoids obstacles also entertain :)
- Actuators / output devices: toy car steering geared motors, L293D Motor controller
- Control method: Autonomous.
- CPU: Arduino Duemilanove
- Operating system: Arduino bootloader, Windows XP and Lubuntu
- Power source: 9v battery, 4AA Rechargable battery pack
- Programming language: C/C++
- Sensors / input devices: bumper switches, SRF05Ultra Sound
- Target environment: Smooth surfaces., Indor