



cr2cX
A robotic platform far various experiments related to this field and to teach my kid some things about robotics. It's 16 years since I have build my first robot and now I want to do it again.
I have decided to buld all modules "from scratch" by using my own designs and home made boards and sensors. I've took the hard way, I know. I have build and test (and sometimes modifed) the boards one by one that is why there are some things that could have been removed and/or improved.
Current version is named cr2c2 and others will come.
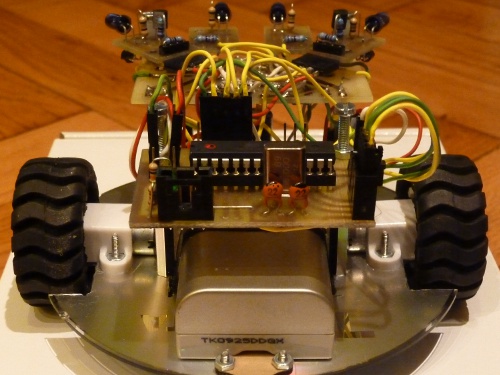
Obstacle detection is done using 4 custom build IR sensors each composed, basically, from a L53F3BT IR LED Emitter and a L932P3BT phototransistor. I have build 2 sensors but I did not like their limited detection capabilities so I have added another two. More details about this sensor configuration are in the blog.
A front picture is at the top of the page. Here are the back and top pictures of the current version:

In current version the obstacle avoidance worked good, mainly because of the software. The test was made by running the robot, with half speed, through a labyrinth made by CD's, furniture and room's walls - first video.
Short term plans: find his base and recharge itself when needed.
Navigate and avoids obstacles
- Actuators / output devices: two 60 RPM Micro Metal Gearmotors
- Control method: autonomous
- CPU: atmega328
- Power source: 7.2V Li-Ion 2000mAh
- Programming language: Arduino
- Sensors / input devices: IR
- Target environment: indoor