


Codename Peek-E
Codename Peek-E is my first robot, well that I built anyway. I own a lot of robots but this is the first time I tried to build one. Peek-E is based off of the "Start Here" robot. I orignally wanted to build a YDM, but after reading all about it, I decided that it is too advanced for me (for now).
That is where this robot comes in. My ultimate goal for this robot is simply to teach me, so that I can build better robots.
It has taught me a lot so far. The biggest thing it has taught me is that things rarely go according to plan.
Although Peek-E started out not knowing what to make of his world, he and I are starting to understand more or it! (The code I am currently using is just a simple rewrite of the "Start Here" code.)
I would like to thank everyone that has helped me thus far.
-Jinn-
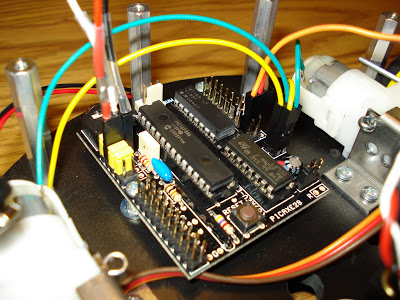
Just a picture of the Picaxe all connected :)
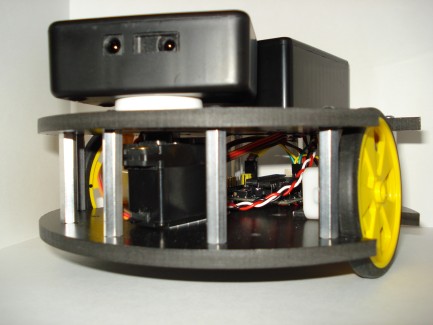
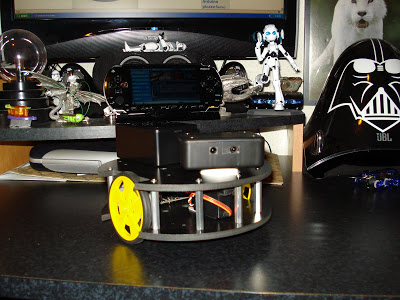
Peek-E chilling on the desk!
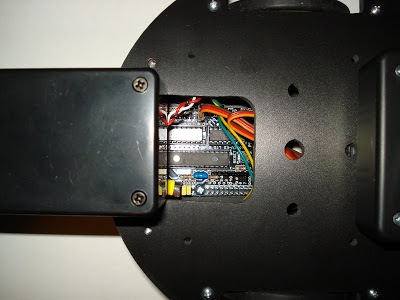
Here you can see the access point to the Picaxe. The Battery box on the rear swivels to allow for access.
Update:(11-13-09)
I'm an idiot! No seriuosly, I am.
My robot would always turn toward the object in his way, thus not chosing the best path. I couldn't figure out why. That is until I realized that my lturn and rturn are reversed, duh!
In my code:
' Decide which is the better way:
if b1<b2 then
gosub body_lturn
else
gosub body_rturn
end if
return
I just changed it to:
' Decide which is the better way:
if b1<b2 then
gosub body_rturn
else
gosub body_lturn
end if
return
And now Peek-E is smart. Lol.
I know I could (should) have changed the actual numbers coresponding to wheel movement, but this was much simpler.
Peek-E: Now with more bumper sticker, HA.

Autonomously explores its world.
- Actuators / output devices: (2) GM9's
- CPU: Picaxe 28x1
- Power source: 3 AA Batteries
- Programming language: Picaxe basic
- Sensors / input devices: Sharp IR
- Target environment: Indoors is best