



Codebits magabot
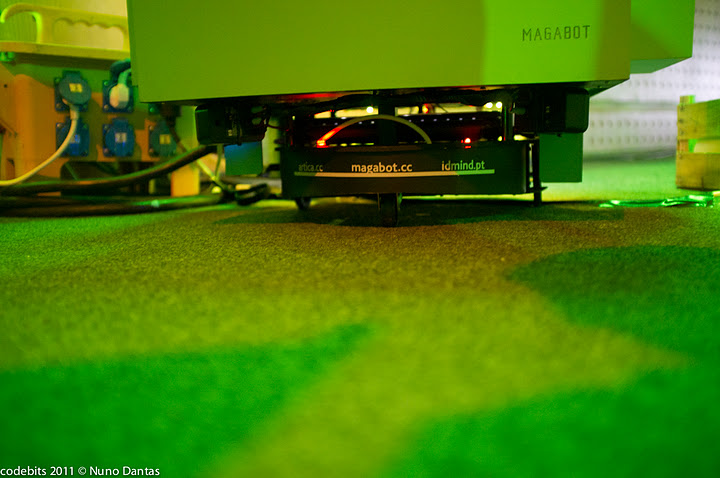
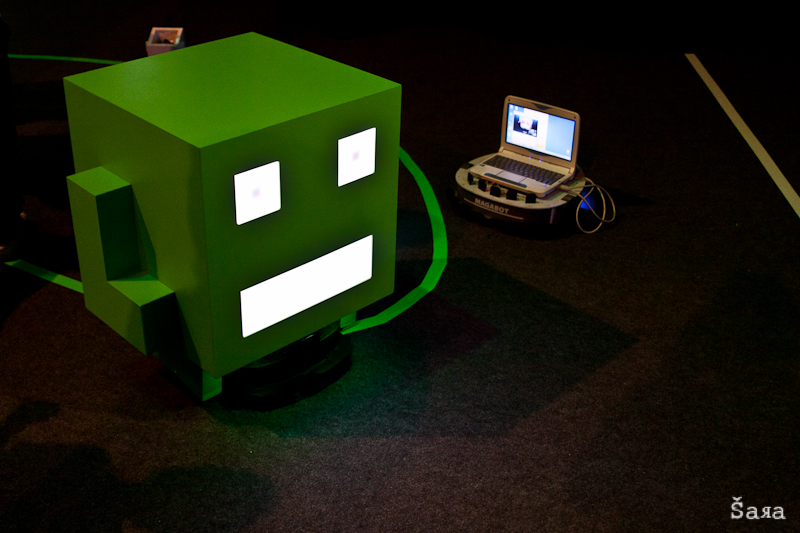
This is a bot that we’ve developed for a event called SAPO Codebits V, which took place on early November in Lisbon, Portugal.
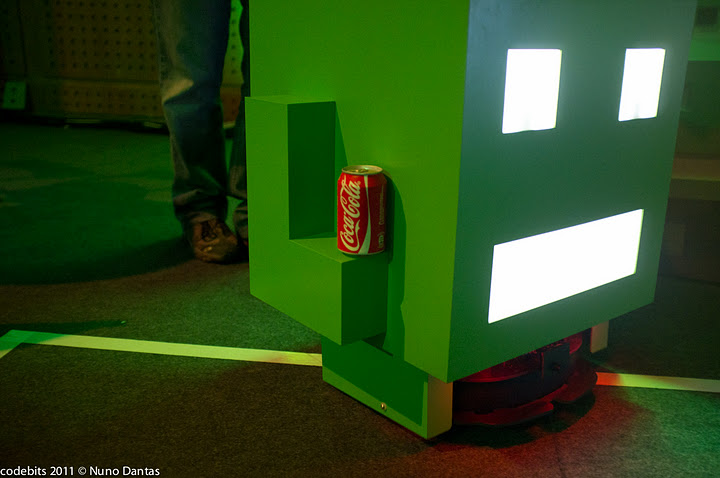
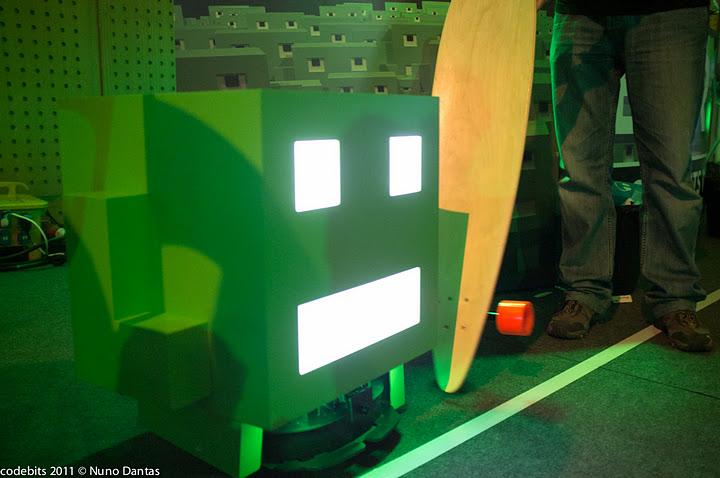
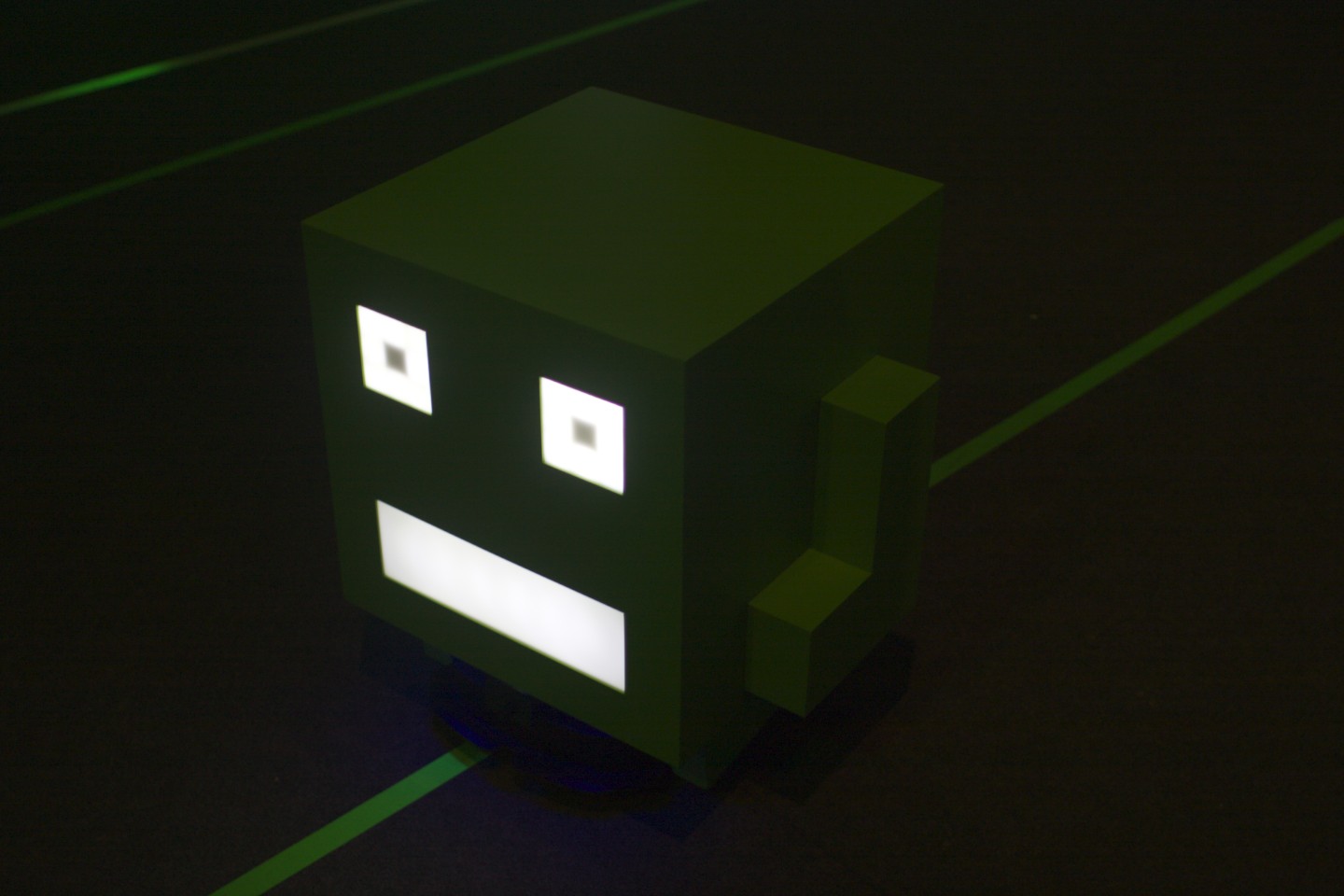
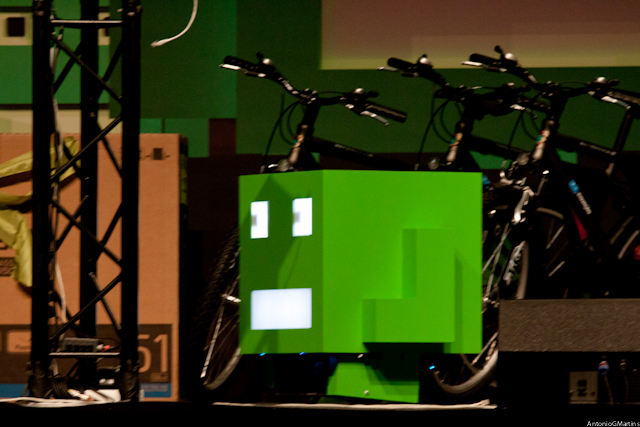
It is basically a Magabot with a personalized cover which represents the event’s mascot. Besides the features that a normal Magabot has, this guy also have 3x3 LED matrices on the eyes, a PS Eye camera, sensors that detect collisions on the four sides and two legs attached to its wheels.
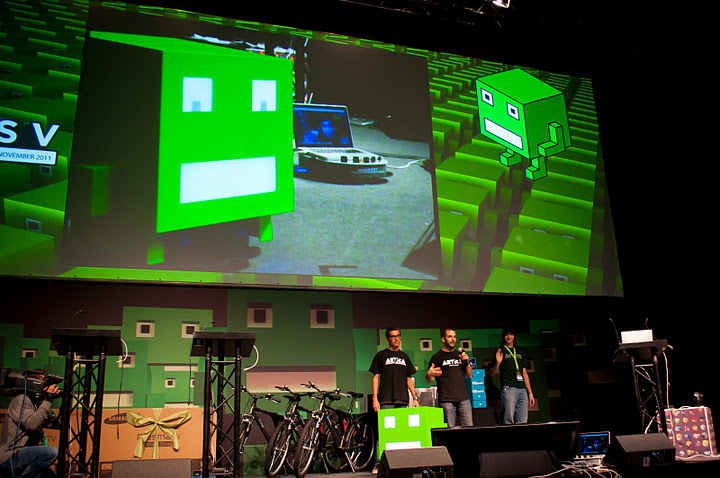
During the event we had it performing telepresence using Skype to control it, obstacle avoidance, line following and being controlled using Kinect as you can see on the pictures.
The kinect application was developed with the Microsoft guys, particularly with Jeff Sipko, a kinect game developer from Washington, USA who also gave a great talk there, which I recommend you to watch: http://videos.sapo.pt/0eWa34cW8En3NtfH9vNz
The kinect analyzed the user’s arms position and sent the orders through TCP to the robot which then moved accordingly. The code is available at artica’s github (https://github.com/artica): Kinect client is the software which runs on the controller computer and skypeRobotController_DTMF is what runs on the robot pc, which also allows you to received orders through skype.
We used the 3x3 TV display to stream the video which came from the robot and placed the kinect next to it so it was really cool as we could feels almost like we were inside the bot :)
Other thing that was really cool to see was the people reactions to it. When it was running there were almost always someone photographing, filming or trying to fool it.
Here are some photos I found on the web:

Telepresence, obstacle avoidance, line following and can be remote controlled using a kinect
- Actuators / output devices: 2x Motor, 2x 3x3 LED Matrix, RGB LEDs
- Control method: Skype, TCP
- Operating system: Windows
- Power source: 7.2V battery
- Programming language: C++, Arduino, C#
- Sensors / input devices: 5x SFR02, 6x Bumper switches, 3x IR ground sensors
- Target environment: flat surfaces