



CO2.1
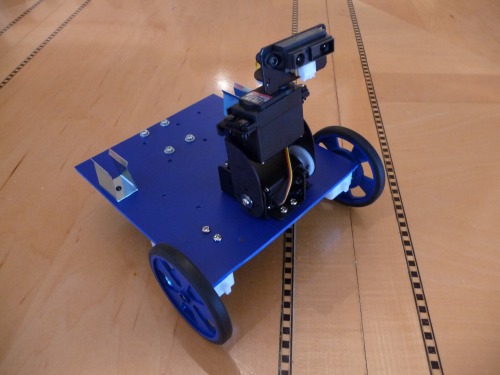
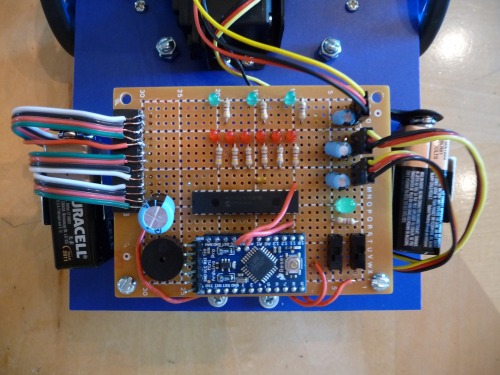
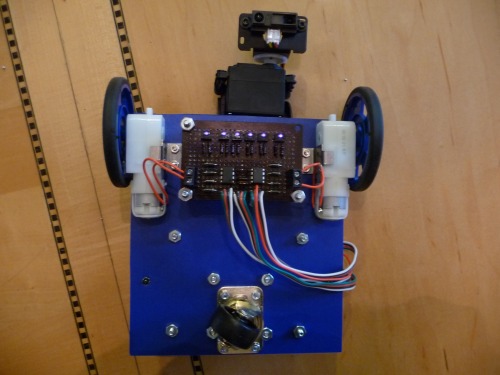
This is my robot CO2.1 which is a prototype for a future robot. It is run with an Arduino Pro Mini and has 6 QRD1114 lne sensors, a Sharp GP2Y0A21YK range finder mounted on a bracket, which is mounted on some servos, which are mounted in their servo erector set bracket's (from Lynxmotion), which is mounted on a blue pvc sintra sheet (from solarbotics). (lots of mounting)
When complete, this robot will have a line following mode and an obstacle avoiding mode. And maybe some awesome combination of both.
The hardware is all complete (soldering, screwing, connecting) except for the new Arduino Pro Mini (the one currently on the robot has a broken resonator and I am not good at soldering surface mount components). Once the new chip comes I will start programming the the robot :D
This isn't the first robot I've built but it is the first robot I've made from scratch (the other robots I built were just little mods to kits) and this is also my first robot using the Arduino.
This robot is just waiting on the new chip I ordered to start programming. It took a while to build but that was just because I'm 15 and jobless (did alot of lawn mowing this summer) but I'm pretty happy with how its turning out :)
UPDATE:
The arduino replacement came so I replaced it, added som filtering caps to the servos and motors, soldered the side connector wires (the female header to the side of the board is useless lol). I was working on the code and I got a motor test and an IR sensor test which was interesting, but I ran out of 9V batteries so once I get those this weekend I will get a video on here :D I was testing my robot when the motors started activating randomly. I thought it was a problem with the mototr driver but when my robot kept restarting itself i checked the 9V batteries on my dmm and saw that they were down to 7V... so im getting batteries soon.