


Chinese Bot
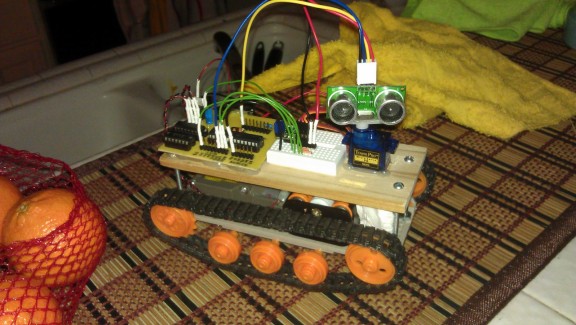
This is the "Chinese Bot". Its called that because 95% of the parts were sourced from China (via eBay). It uses Tamiya dual-motor gearbox, a cheap home-made arduino clone and has a 3-axis accelerometer.
The arduino runs a neural network, which controls the output speed & direction of the two motors.
The inputs to the network are:
- Left Motor speed
- Right Motor speed
- Left 45 degree distance measurement
- 0 degree distance measurement
- Right 45 degree distance measurement
The accelerometer detects if there was a collision with an object (ie. wall). If so, it stops the robot and trains the neural network with the inputs prior to collision. After some time (the arduino is slow, and it usually takes about 20 seconds for the training to complete), the robot starts back up and continues.
Update: I fired up the bot for the first time in over a year and captured some video of the learning phase. When I get some more time, I'll let it run for a long time and capture additional video of the fully trained network. As you can tell from the pauses during training, it can be a long & time-consuming process.
Learns to navigate via Neural Network
- Actuators / output devices: 1:120 Tamiya Dual Motor Gearbox
- Control method: autonomous
- CPU: Atmel ATmega328
- Power source: 6 AA NiMH
- Programming language: C
- Sensors / input devices: 3-Axis accelerometer., HC-SR04
- Target environment: indoor