



Charles the Planar Biped
Charles was a Planar Biped designed to choreography a human's walking pattern over a flat terrain. Its main design was a Planar Biped Model, a bipedal robot in which it needed guided balance to walk, or using a long bar to keep its stability. At all times, Charles was connected via a computer with two USB ports, and was programmed with the Linux programming Language. It's specific trials were recorded three times in the end to make a perfect choreographed walking pattern. Charles' approximate assembly time was a period of 96 hours (4 days), and after assembly, the programming took over a period of 24.5 hours (1.5 days). Charles was an individual project for me, and was not designed and constructed by any other individual.In addition to many pictures, there is a you tube video of me explaining how it was designed and all the walking trials there had to be before Charles' would be able to walk.Note: the video is best viewed using Google Chrome.
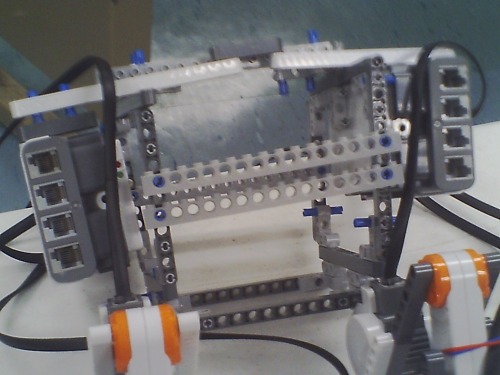
Charles was a Planar Biped designed to choreography a human's walking pattern over a flat terrain. Its main design was a Planar Biped Model, a bipedal robot in which it needed guided balance to walk, or using a long bar to keep its stability.
- Actuators / output devices: 6 MINDSTORMS NXT SERVOS
- Control method: Semi-autonomous
- CPU: LEGO MINDSTORMS NXT 2.0(32-bit ARM7 Microcontroller)
- Operating system: C++ and LabView
- Power source: 4.5
- Programming language: Linux
- Target environment: indoor flat surfaces