


Chariot Security Bot
Ok first a little something about the name :)
Thought about some fancy name but after that profile picture it reminded me of a Roman Chariot so it got baptized that same moment :)
This is still in its early days, but it is supposed to become a security (line follower) robot, that goes through predefined path, and stops at some specific points. It has a USB camera plugged to the Raspberry Pi that streams to a local site.
The robot will be autonomous but it can be accessed through the internet and controlled via SSH where Python will send commands via Serial Port to the Arduino, manly to control the Pan Tilt Servos of the camera. At any given moment the Robot can be accessed and stopped so you can Pan and Tilt at any point of the track.
It is supposed to be a security drone that cycles trough the house streaming video. Later I will try to add microphone to detect sound...
I tried to do everything with the (50Ah) USB batterie but the 5V it outputs don't seem to be enough to power the DC motors. :(:(:( The initial goal was that but it seems impossible... I'll give it a try later.
As you can see in the video the robot describes a circle when it was supposed to go forward... :) I'll have to tune the speed of one of the wheels...
There is still a lot of code to write... Line following code, Tilt Pan, Ultrasound object detection, Raspberry PI to Arduino via Serial to command the robot... but I'll keep you posted real soon :)
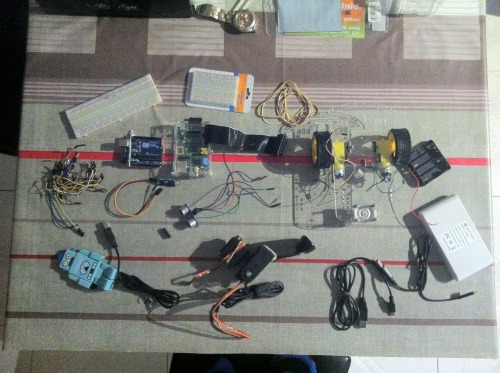
Hardware used:Raspberry Pi, Arduino UNO,Magician Robot Platform with two DC Motors, 2 Servos, USB Camera, PAN/TILT brackets, USB HUB (the little blue robot), USB battery (5V - 50000mAh), HC-SR04 sensor, 1Wifi Dongle, LD293D Chip, 4xAA case, 1 medium breadboard, 1 mini breadborad and lots of jump wires...

IR pair (Sender and Reciever)




USB HUB connected to the Raspberry Pi, for powering Wifi Dongle, USB Camera and Arduino.
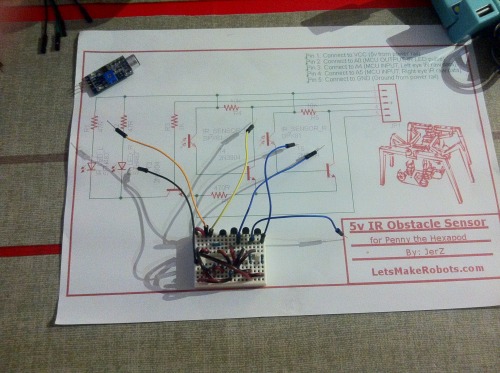
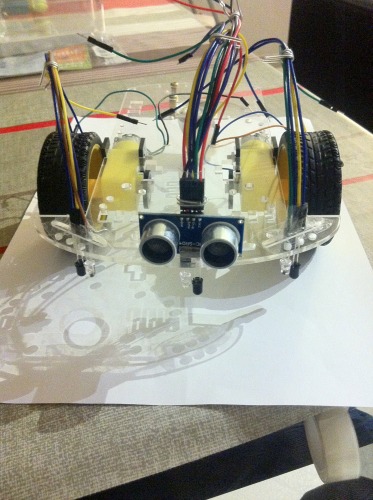
JerZ circuit for IR sensors used in the line follower. Added one more IR pair for the diferential calculation of the path.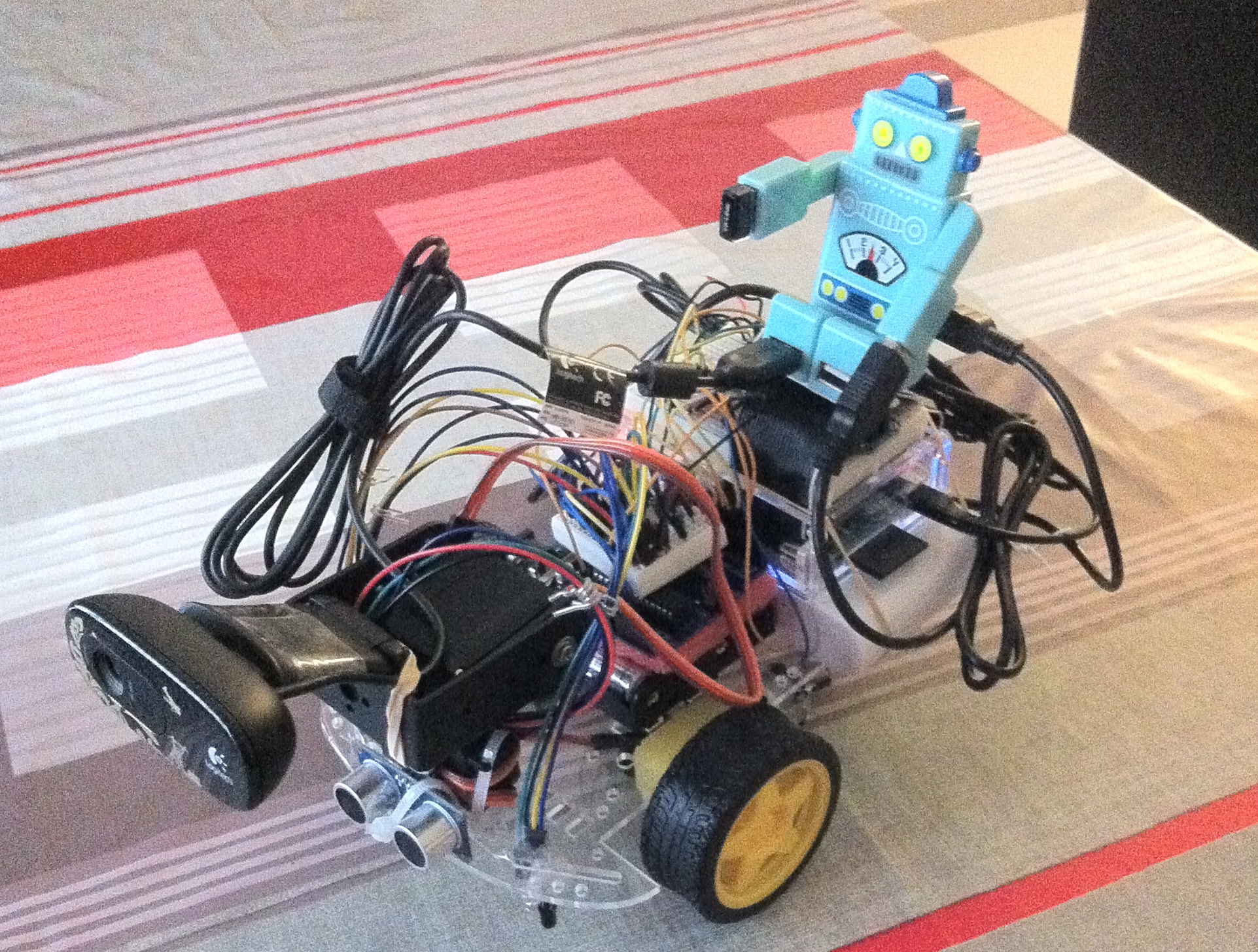
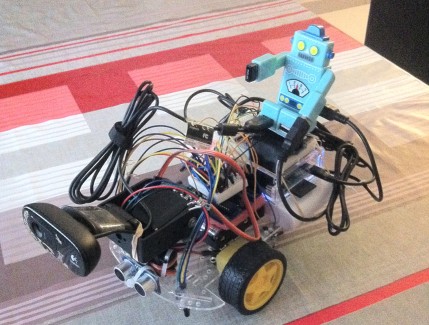
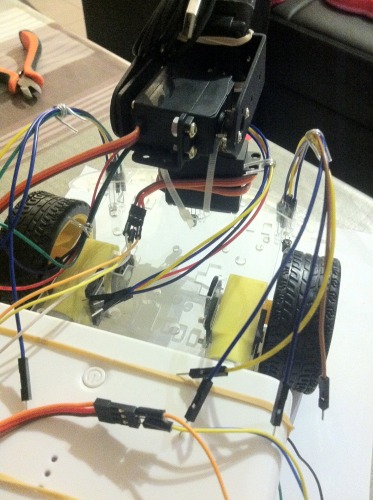
Final look... Sorry for the wire mess :) but basicaly there is a mini breadborad on top of the Arduino and they are both on top of the batteries holder.
On the rear section there is a USB batterie for powering the Raspberry Pi on top. There is also a breadborad with the LD293D chip for controlling the motors and the adafruit Pi Cobbler, that for the moment isn't used.
Finaly on top of this piramid :) commanding it all the "Driver" Mr Robot USB HUB :):):)
Line Follower, Ultrasound collision avoidance, Streams Video
- Actuators / output devices: 2x6V DC Motors
- CPU: Raspberry Pi and Arduino
- Operating system: Arduino C and Linux for Raspberry Pi
- Power source: 1xUSB Battery (5V; 50000mAh) and 4xAA batteries
- Programming language: Arduino C and Python
- Sensors / input devices: HC-SR04, 3 Infrared LED / photo transistor pairs
- Target environment: indoor