



Charge Spin Robot
I use a single micro-servo to turn two "fingers" back and forth on the X axis. The servo is connected to a sensor shield powered by external 6 volt power supply. Use Arduino Uno and an HC05 Bluetooth module to control the servo using the very excellent RoboRemo phone app - the $1.59 version that allows unlimited widgets using only Bluetooth for communication. The software is easy to use, has a small footprint and is reliable, unlike some other apps out there.
Future plans: if I have the motivation, I will build another two finger holder using smaller fingers. The fat fingers require greater servo movement and faster servo response.
Update April,2020: last video showing final project with single servo operating top finger and single servo operating both fingers:
Update: latest video shows thin fingers - better spinning.
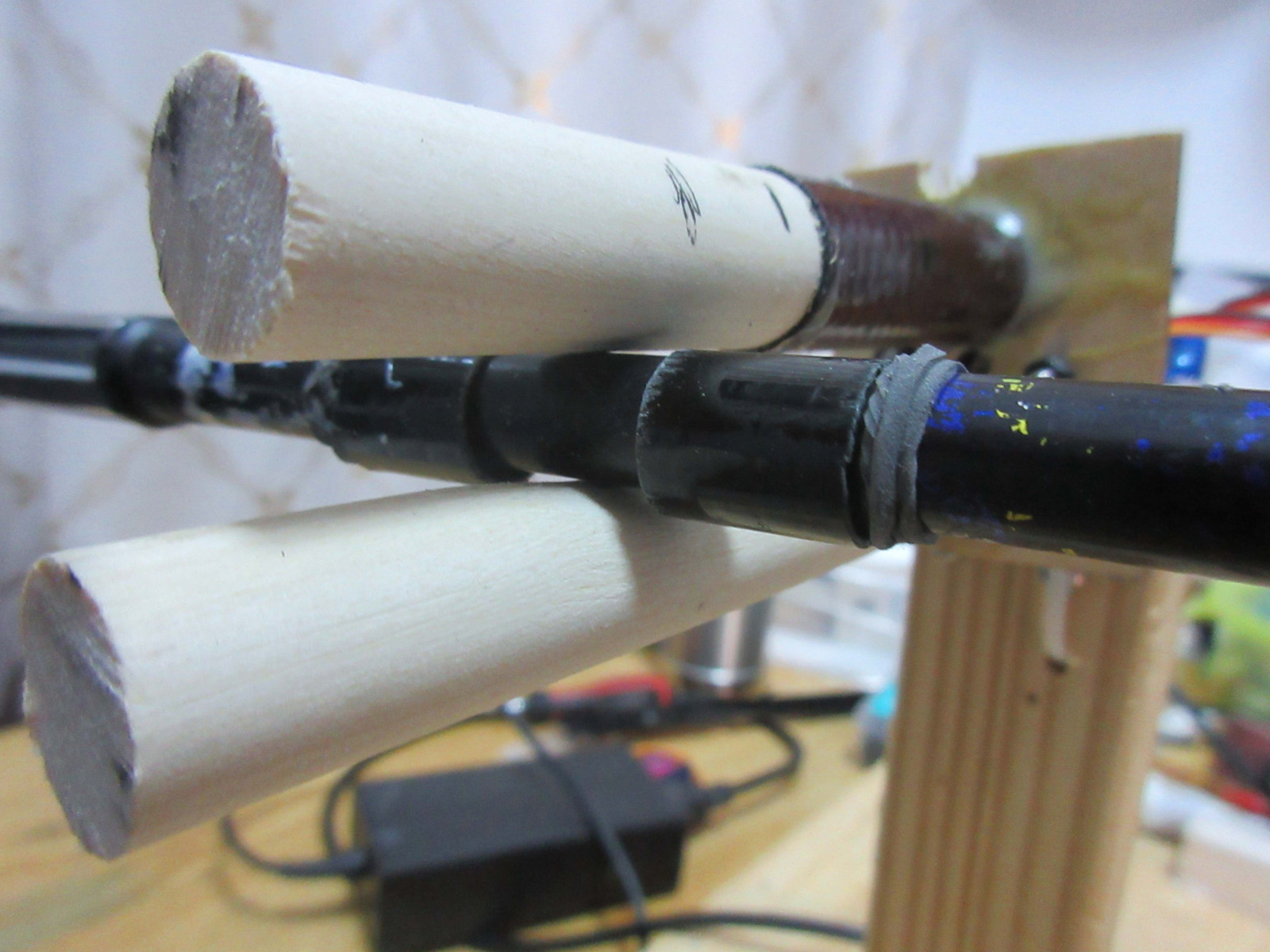
Notched the lower finger to trap the pen. Also on the pen are a couple pieces of tubing and rubber bands to trap them in place. This is necessary to keep the pen centered for long periods of time. For short periods of time they are not required.
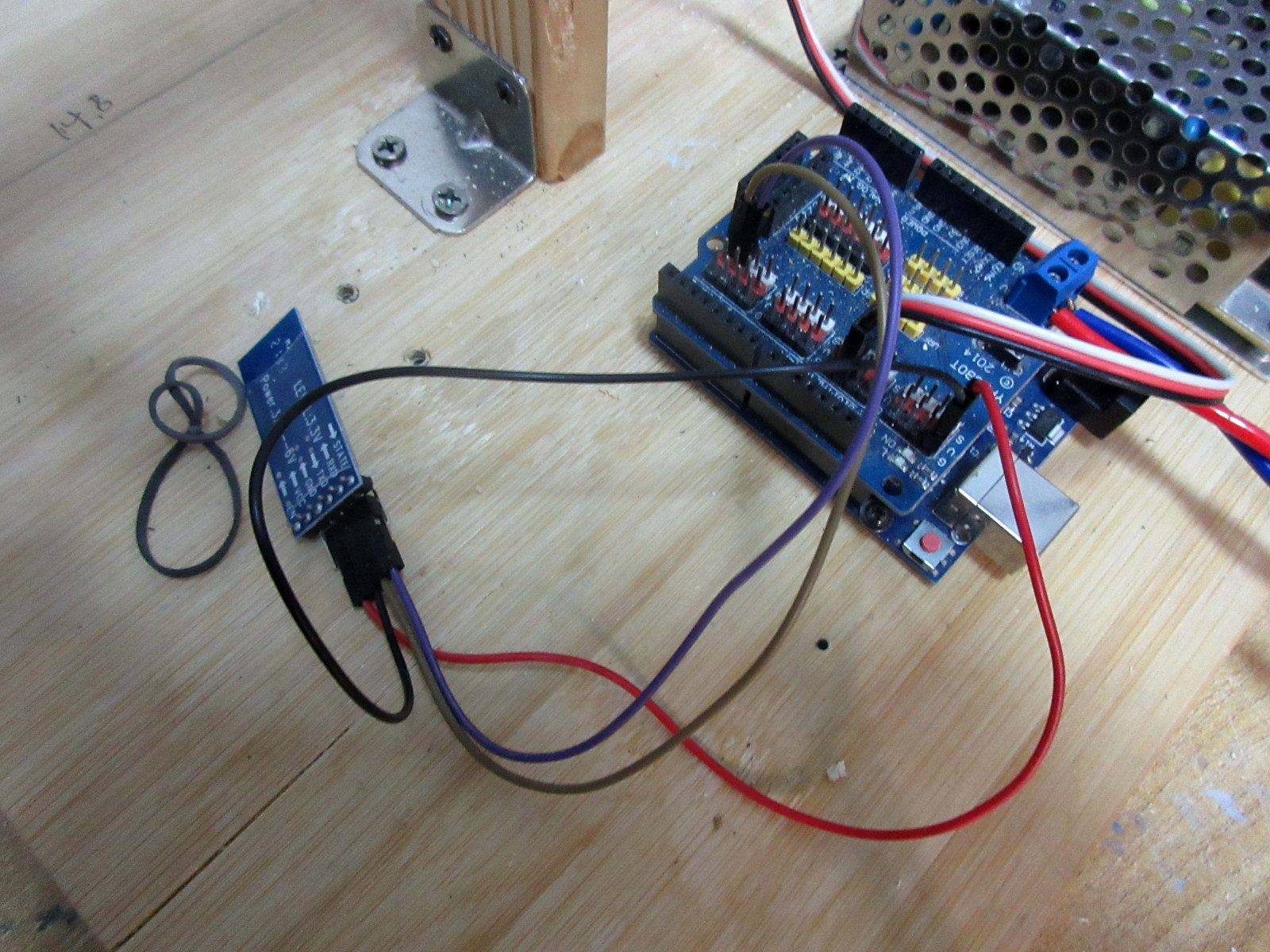
Arduino Uno, sensor/servo shield, HC05 Bluetooth.
Here is what I want to do on the machine. What mechanics are at work here?
Question: why does this work? Why does the pen oscillate along the Z axis rather than just go up and down on the X axis.