



Caterpillar Type 1 - USB Rechargeable Handmade Light Seeking Robot - BEAM
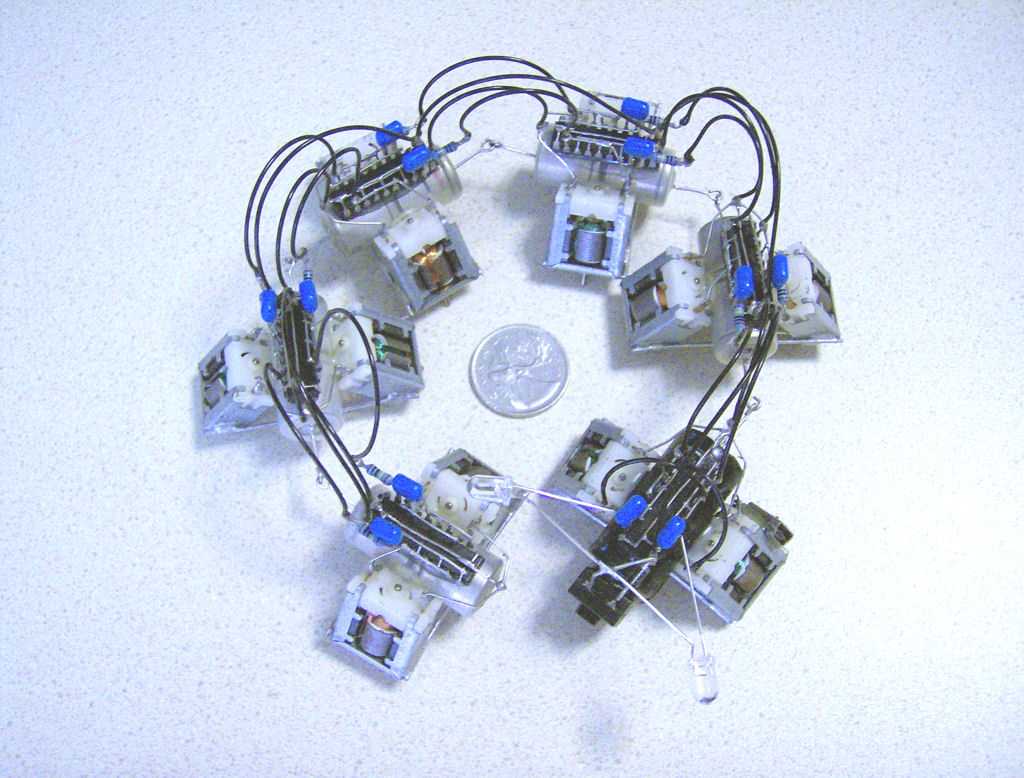
Robot Caterpillar Type 1
Oscillates left right, left right while chasing light.
Six body segments which oscillate independently as well as being influenced by the head segment's eyes.
(Head Bicore with 5 Slavecores)
Travels about 1 Foot every 2 Seconds on smooth surfaces.
One of a kind, handmade BEAM inspired working robot.
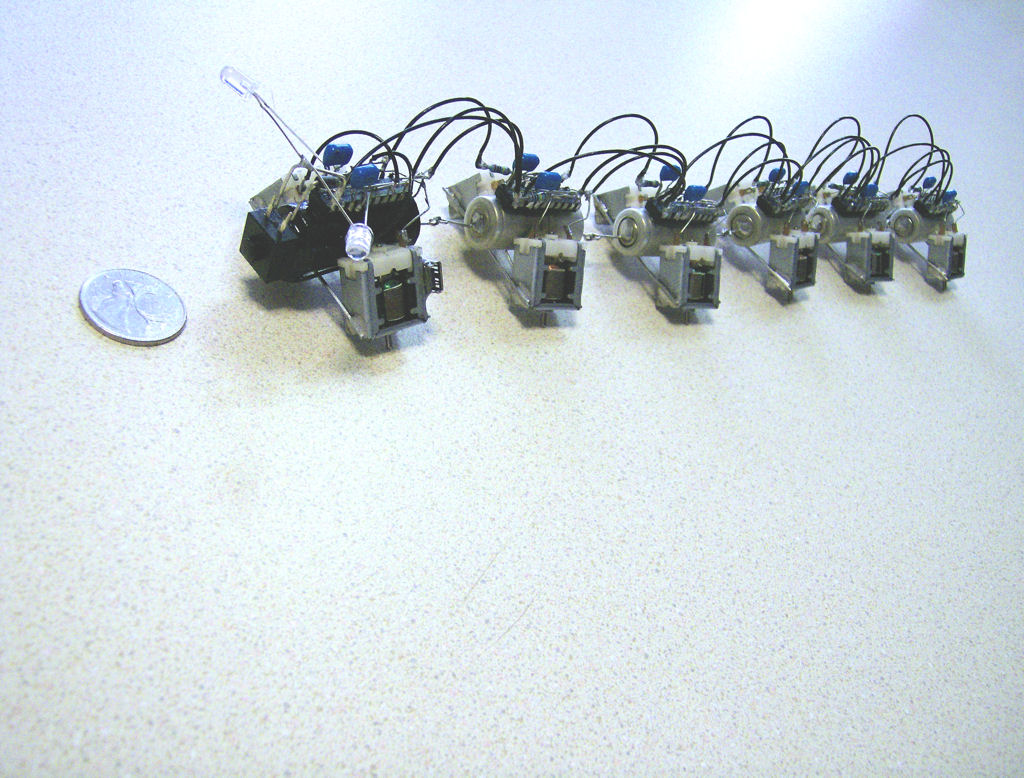
Has a Lithium Ion battery which runs for 20 to 30 minutes on a full charge. Charges via USB cable in about 10 minutes.
This one recharges using mini-b USB cable (for cameras and cellphones).
He has a High and Low speed.
13" Long x 2" Wide x 1 1/2" Tall
_________________________________________________________
ABOUT ME
My purpose is to amuse you and provide you with an example of analog intelligence and simple mechanics.
I have no programming and no processor.
My mind consists of a basic decision making process with analog light inputs.
I follow light.
I have been assembled from components intended for computers, toys, cordless telephones and cell phones.
The circuit I designed for this robot is basically an oscillating Inverter based BiCore.
A pair of Phototransistors bridged between positive and negative control the oscillation duration of the head segment.
Each body segment is an independent oscillator influenced by the head segment, causing the variations in the head segment to travel along a chain in a delayed fashioned.
The influence of the head segment are rippled along the body segments.
________________________________________________________
Other Robot Projects in the Works.
We welcome custom electronic & robotic requests.
Follows Light
- Actuators / output devices: 12 Electromechanical DC Motors
- Control method: autonomous
- CPU: none
- Operating system: none
- Power source: 3.6V LiPo
- Programming language: none
- Sensors / input devices: Photottransistors
- Target environment: Tabletop, Floor, Countertop