



Carpet Rover [IsoBot02] new look
Hi, Everyone! I have just started my second robot: IsoBot02 - The Carpet Rover :) He is going to roam around via Sharp IR sensor and compas module. And I am going to make him to return to home base. Ah, almost forgot: he is going to communicate via Xbee.
13-June-2009
So, I have received some parts for 02: HITEC Servos, Compas module, Sharp IR distance sensor. Waiting on rest of parts currently: Picaxe 28x1 + Project board, XBees, and some small parts. But I have everything I need for chassis, which is going to be 4 wheel (ripped off the toy millitary vehicle) each driven by a servo modified for continious rotation. All this is going to be mounted on god-knows-how-old emty "ChocoCream" plastic box which I used to store batteries in.


Thanks to fritsl and his https://www.robotshop.com/letsmakerobots/node/5086 I had a good idea what to do, and it took me 5-6 minutes per servo just because HITEC servos have not this little thingey in between potentiometer and gear which you can simply remove.
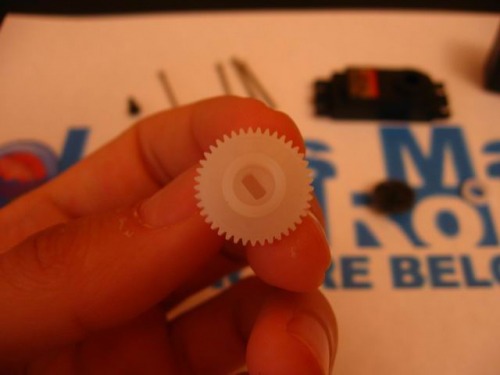
I had to drill the hole in gear with 4.2mm bit. And difficulty with this was how to hold the gear to prevent it spinning and not damage the teeth of gear. Next photo shows what "device" I came up with :)

Everything else went just smooth, so I have got 4 servos ready to drive my Carpet Rover :)
Then wheels were modified to become "servo mountable", Servos hot glued to chassis.


Video #1 shows newly built 02 chassis test.
I've tested it on three types of surfaces: tile, laminated flooring, and carpet which IsoBot01 had big problems with turning on. So, I can say 02 has his chassis ready! :) Cannot wait for rest of parts tobe delievered!
21-June-2009
Nice weekend, got the rest of parts! :D And time to work on 02. First of all The project board prepared and mounted on chassis, wiring, etc...

Next goes my compass module from Devantech. Unfortunately readings I get from it are wierd. Even after caibration. North appears at different azimuths in different locations of my place. Does not completely mismatches but fluctuates significantly (+- ~20 deg). Looks like I've got pretty EM-polluted room :) And I had to add separate regulated power supply dedicated to compass module as it did not want to work stable otherwise (...Manufacturers told you about it, Isotope, you tried to ignore them!... :D ) . Video #2 does show compass test. Hope I will be able to get some useful data for navigation when time comes for 02 to perform more fancy stuff than it can at the moment, which is just wandering about and trying avoid obstacles. You can see him doing it on Video #3. So, I feel satisfied with my work this weekend and looking forward to continue whenewer I get free time. Things in plans are: Adding bumper switches, second IR sensor to look down and forward, XBee, And I will need to start designing base station for 02 at some point... Sounds good to me :D

1-July-2009
These days I had some time to work on hardware of 02. As per plan the mods were: bumper switches, external programming socket for Picaxe download cable and second IR distance sensor to look down-forward. I have completed all my plans (you can see it on new main picture) except one. I gave up second Sharp sensor. Tried couple of setups with different angles but did not manage to reliably identify voids. So, 02 better stay on floor level for now :) Another news: I have bought the box which is gonna be 02's dock station in nearest future. Did not have enough time to do more programming apart from making 02 use his new bumper switches.

4-July-2009
Opened my robot and desided that there is enough space for all parts inside. So I got rid of this ugly box and 9V battery piled on the back of 02. New "utilities board" (I will call it so starting now :D) got fitted inside IsoBot. And I found out that.... Compass module works much better now for some reason... Anyway, back to work! :D
9-Jan-2010
Finally, I returned to my long term 02 project. Few minor upgrades made to the bot, they are: Both servos of each side connected to same picaxe output, so I have cut driving pins count from 4 down to just 2. This is a good news, as I will have 2 more free utput for different stuff. Next upgrade is: I superglued rubber tires to wheels (previously they tended to rip off when turning on carpet). And the last, but not the least, 02 have got new Picaxe 28x1 chip. This is because I discovered the old one looks faulty as it was stopping execution of program for approx. 20 seconds in particular part of program. This bug disappeared with chip replacement. Looking back from height of this discovery I suspect all compass problems I had with 02 in past could have been caused by faulty chip... This is it so far. This weekend I hope to work on dock station for 02. Progress, if successful, will be posted in blog :) Other big plan is XBee chip installed... Ah, brand new photo of 02:

Navigate via IR and Compass. Returns to home base. Communicate with computer via Xbee.
- Actuators / output devices: 4 x HiTec Servos modiefied for continuous rotation
- Control method: Autonomus/RC
- CPU: Picaxe 28x1
- Sensors / input devices: Sharp IR, xbee, CMPS03
- Target environment: Indoor [all surfaces]