



Carmen
We built this bot for the FIRST Competition - This will explain a lot (http://www.youtube.com/watch?v=ZnGfbGzEFrM)
We plan on harvesting balls and using the belts to tranport the balls up to the pistion, after that I hope to pin other bots and launch then in to there trailer. Let me know what you think of our desgin.
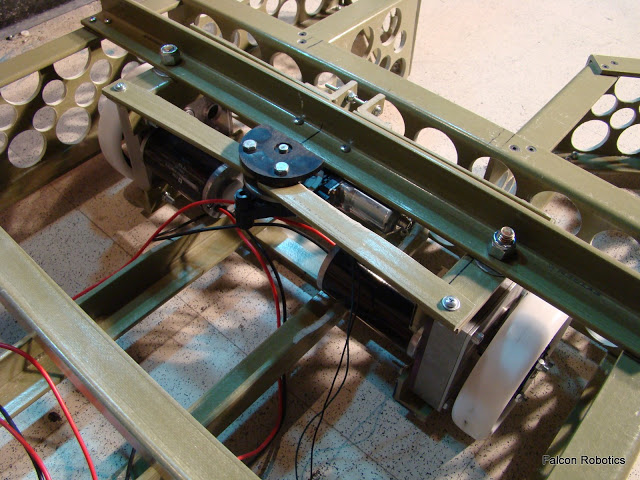
We went with Ackermann steering to have better control of the bot, we usually use tank drive.
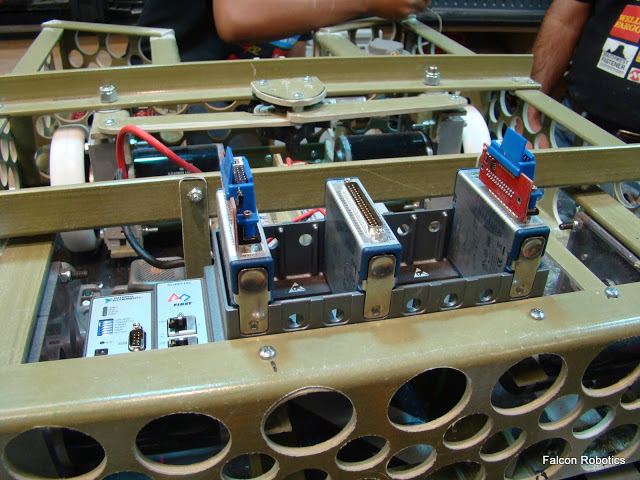
Here is the Robot Controller

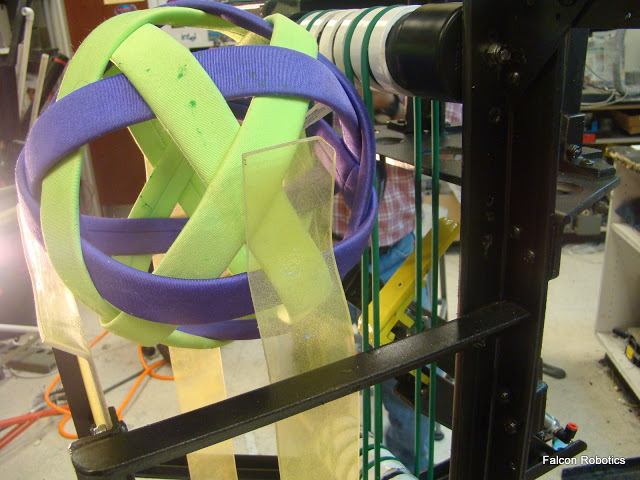
Here the game piece that we will be competing with

Close up of our rollers, just an ABS tube with PVC rings to keep the polychord from traveling

Heres is a view of our shop

Ready for action (On a prototype frame)
View of ball ready to be luanched
- Actuators / output devices: Four 2.5in CIM motors, Two Van Door Motors, One Fisher Price Motor, .5in Bore 12in stroke Bimba Piston
- Control method: WiFi 5g Autonomous/Tele-Opted
- CPU: Power PC 32bit
- Operating system: LabView
- Power source: 12v Batter 16amp/h
- Programming language: LabView/C++
- Sensors / input devices: Limit Switches, Button Box, IR photogate
- Target environment: Areana