



Canopus - support UAV in rescue missions
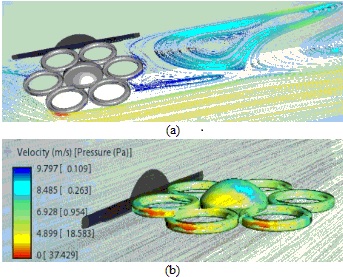
Canopus is a UAV for helping in saving drowning victims in beaches, pools, lakes, rivers and stuff. I designed it by hacking into a commercial hobby model (the V323 from WLToys). I studied its properties like aerodynamics and thrust and simulate it in softwares like FlowDesing. By the data acquired, I could modify the frame to carry a mechanism to hold and release a buoy (when its commanded by the operator).
I developed the mechanism control apart from the flight controller board so I can attach it in any multirotor I want, making the mechanism (and its control) functional independently of the multirotor that it is attached. The control system is based in two Arduino Nano that communicates (one keeps in the ground and the other one stays with the drone) through NRF24L01 2.4GHz wireless communication modules. The Arduino in the drone controls the mechanism of the buoy by driving the DC motor that runs the mechanism (it does it through a H-bridge L298 module, also embedded in the drone).
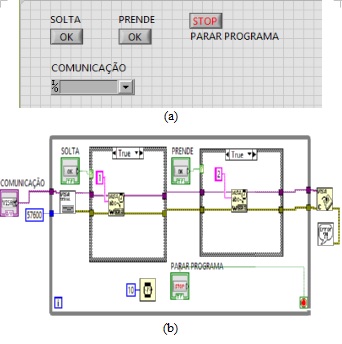
The Arduino in the ground is used to send the commands of the user. The commands are sent by serial monitor in the Arduino IDE through a notebook. The commands also can be sent by a virtual instrument made in LabView. The LabView software was chose because, in the future, I can develop the project more and possibly implement some image processing in real time for the Canopus to find drowning people by itself, not needing an operator to perform the rescue, and LabView is great for image processing. The developed vehicle is currently functional.
I don't consider it done because I intend to keep working on it and improving it, but for now these are the results I have to present you guys. I hope you like it.

Thanks for reading, I see you in future updates.
Fly around through RC control and helps saving people from drowning