


C.D.S.
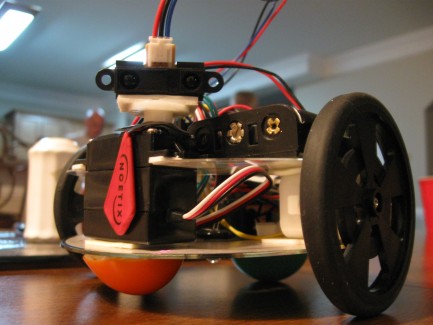
Hi this is my first robot based on the Start Here Bot.
Thank you for all of your help I hope you enjoyed my first robot.
Here's more pictures:
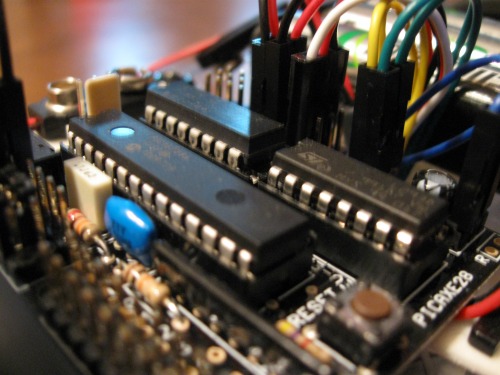
The brain:
Shiny:
The code (bask in it's glory):
symbol dangerlevelmin = 18 ' how far away should thing be, before we react?
symbol dangerlevelmax = 85 ' how far away should thing be, before we react? note (150 is closer than 110)
symbol turn = 300 ' this sets how much should be turned
symbol servo_turn = 225 ' This sets for how long time we should wait for the servo to turn (depending on it´s speed) before we measure distance
wait 5
'****************************************************************************************************************************************************************
main: ' the main loop
servo 0, 150
pause 150
readadc 0, b2 ' read how much distance is straight ahead
gosub checkdangerlevel
servo 0, 205
pause 150
readadc 0, b2 ' read how much distance is toward right side
gosub checkdangerlevel
servo 0, 150
pause 150
readadc 0, b2 ' read how much distance is straight ahead
gosub checkdangerlevel
servo 0, 95
pause 150
readadc 0, b2 ' read how much distance is toward left side
gosub checkdangerlevel
goto main ' this ends the loop, the rest are sub-routines
'****************************************************************************************************************************************************************
nodanger:' this should be your combination to make the robot drive forward, these you most likely need to adjust to fit the way you have wired your robots motors
high 5 : low 6 : low 4 : high 7
return
'****************************************************************************************************************************************************************
whichway:
gosub totalhalt ' first stop!
'Look one way:
high 3
gosub lturn ' look to one side
pause 50 ' wait for the servo to be finished turning
readadc 0, b1
low 3
gosub totalhalt
'Look the other way:
high 3
gosub rturn ' look to another side
pause 50 ' wait for the servo to be finished turning
readadc 0, b0
low 3
gosub totalhalt
' Decide which is the better way:
if b1<b0 and b1 < 18 then
gosub body_lturn
else
gosub body_rturn
end if
return
'******************************************************************************************************************************************************************
body_lturn:
high 4:low 5
high 7:low 6' this should be your combination that turns the robot one way
pause 680: gosub totalhalt
return
body_rturn:
high 6:low 7
high 5:low 4' turn the robot other way
pause 680: gosub totalhalt
return
'******************************************************************************************************************************************************************
rturn:
servo 0, 225 ' look to one side
pause 200
return
lturn:
servo 0, 75 ' look to the other side
pause 200
return
'******************************************************************************************************************************************************************
totalhalt:
high 2
low 4 : low 5 : low 6 : low 7 ' low on all 4 halts the robot!
Servo 0,150 ' face forward
pause 150' freeze all for 150 milaseconds
low 2
return
'******************************************************************************************************************************************************************
checkdangerlevel:
if b2 <= dangerlevelmax and b2 >= dangerlevelmin then
gosub nodanger ' if nothing ahead, drive forward
else
gosub whichway ' if obstacle ahead then decide which way is better
end if
return
'*****************************************************************************************************************************************************************
Navigate via I.R.
- Actuators / output devices: 1 Servo, 2 LEDs, 2 geared moters
- CPU: Picaxe 28x1
- Operating system: Basic
- Power source: 3AA cells for logic circuits, 1 9 volt for moters and servos
- Programming language: Basic
- Sensors / input devices: Sharp IR
- Target environment: indoor flat surfaces