



Bunker
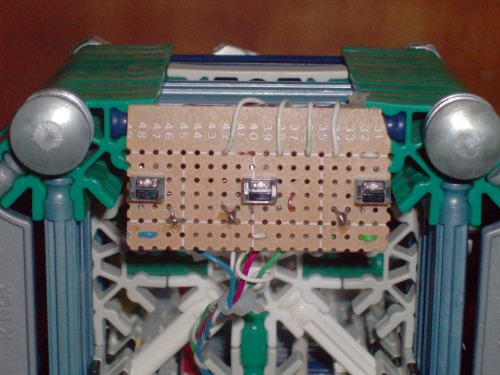
Bunker is a small house bot that I am developing (altho, the developement has stalled somewhat as i moved on to other things. When some of my other projects are compleat, I hope to add some more functionality) so far I have been able to make him avoid running into things, and if he does, detect it and take evasive action, and follow lines using a homemade line sensor board.
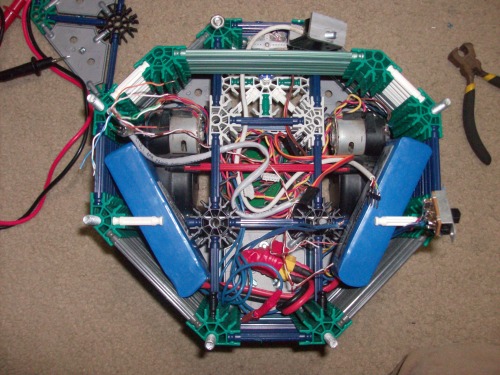
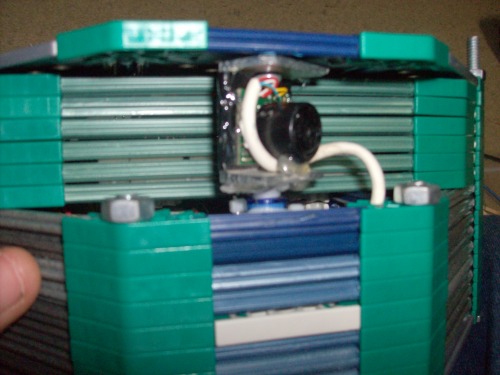
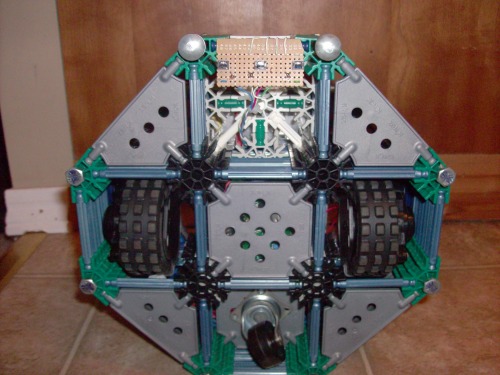
Motor control is via a L298 motor control board, and I also use the current sensing feature to see if it has run into anything. The shell is made from a large amount of k'nex octogons stacked on top of each other and bolted together with 1/4 in bolts and nuts.
at some point I will hopefully develop a way to find a home base and dock there for self charging. the base is strong enuf to carry a netbook or laptop, so I could have a nice web based telepresence robot once the docking feature is built.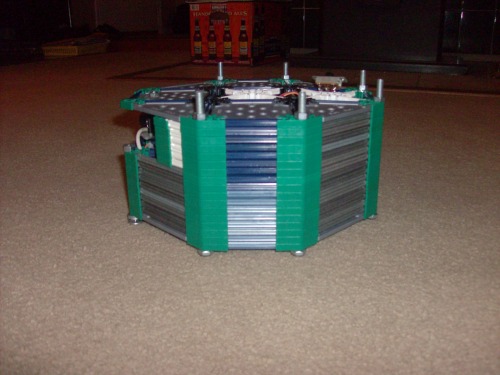
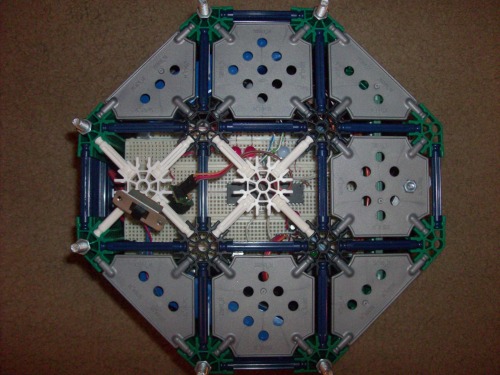

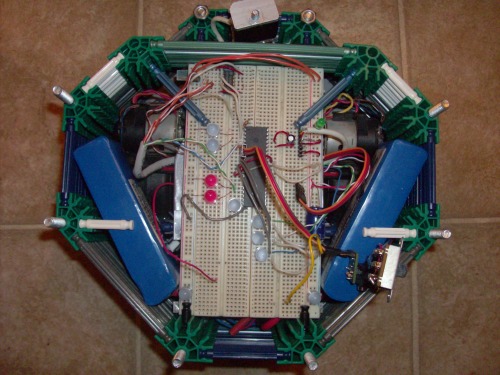
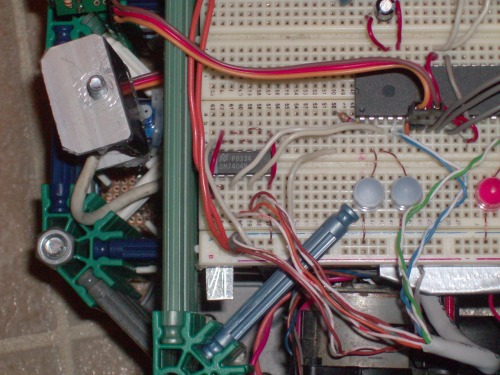
a closeup of the inverter gate used to drive the L298 board, only 4 pins are used on the microcontroler, 2 for each side's direction, and 2 for each side's speed/enable.
Avoids running into things and follows lines
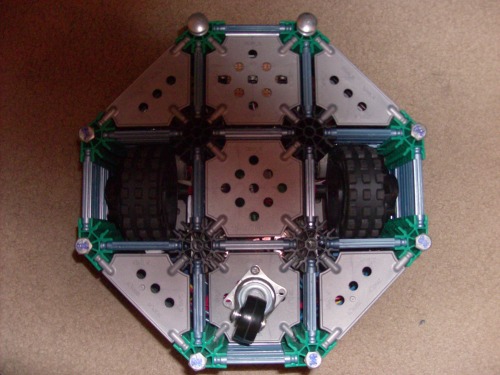
- Actuators / output devices: Roomba motors/wheels, servo for head turning
- CPU: Picaxe 40X2
- Power source: 2x 11.1 v lipo packs in parallel
- Programming language: Picaxe basic
- Sensors / input devices: 3 QRD1114 reflectance sensors for line following, Maxbotics LV-EZ1
- Target environment: indoor