



Build a Programmable (MSP430-based) Hexapod Crawler for $40+
I modified a toy hexapod crawler kit using the MSP430 LaunchPad as the controller. A SR-04 Ultrasonic distance sensor has been added to the existing whiskers for enhanced navigation. The MSP430 is programmed using the Energia IDE. As a result, one can keep adding new capabilities and behaviours to the robot easily for fun and research. At present, it can either wander around using SR-04 and whisker navigation or follow the wall.
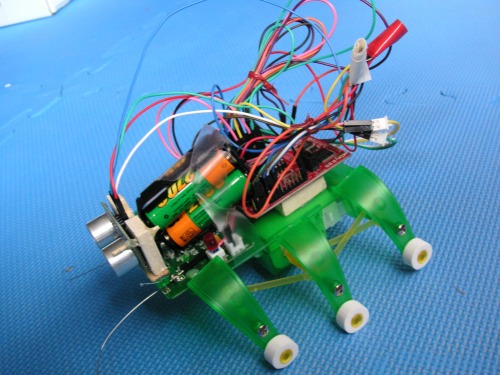
Here is a pictorial walk-through of the project:

Points of Interest:
- the kit's original circuit board is kept so that the whiskers mounted on it can be reused. The traces on the circuit board connecting the whiskers and the onboard electronics have been cut to allow MSP430 to take control
- the kit's 3 X AAA battery holder has been replaced by a 4 X AA battery holder as 5V is required for the SR-04 distance sensor
- the MSP430 Launchpad is powered by the batteries via the connections to the TP1 and TP3 male headers I soldered onto the LaunchPad near the USB connector
- the MSP430 Launchpad, motor driver and SR-04 are mounted using small pieces of plywood and hot glue
- which behaviour to execute (wander or wall following) is controlled by the pushbutton on the LaunchPad
- the yellow/red LED on the LaunchPad is lit when the left/right whiskers is in contact with something respectively
Navigate around using SR04 and whiskers or wall following
- Actuators / output devices: 2 x dc motors
- Control method: Full autonomous
- CPU: Msp430g2553
- Power source: 4 x AA cells
- Programming language: C++
- Sensors / input devices: SR-04 ultrasonic distance sensor and whiskers
- Target environment: indoors