



bug
UPDATE I stopped working on this version, the new version is here https://www.robotshop.com/letsmakerobots/bug-20
I have created my first part of my first robot, I am ready to make my entrance in this section of LMR. My robot will be modular, I will start with 3 modules each with 2 legs. This will classify the robot as an insect. If I manage to create more segments it will be a centipede I guess.
If all works well I will submit my robot to the one motor chalenge.
The servo will rotoate the main axis from -80 to +80 degrees for straight movement. From 0 degrees to -80 and back, the odd legs will go up and down. From 0 degrees to +80 and back the even legs will move up and down. So always half of the legs will be down, which means no loss of energy.
The forward - backward movement is a little tricky because it is out of phase with the servo movement, it lags behind 1/4 of the cycle. I designed a mass-spring system for each segment (the mint-green parts). Empirically I will have to tweak it so its frequency will match the oscilation of the servo (between 0.5 and 1 herz). This will have the effect (I hope) that the insect will start by just moving its legs up and down, and then slowly gains speed. In theory a lot of the kinetic energy is preserved, so the robot should run quite fast.
Steering is the other challenge. Each segment adjusts the leverage of the forward-backward movement of its legs depending on the postion of its front neigbor. So basically the thing goes where the head goes. I can use the remaning 10 degrees of the servo to move the head, using the same servo. So when the servo moves from -90 to + 80 the centipede will go left.
I plan to make a small series of this robot. Anyone interested in getting a free prototype, in exchange for feedback? The prototype will be laser-cut from polystyrene plate.
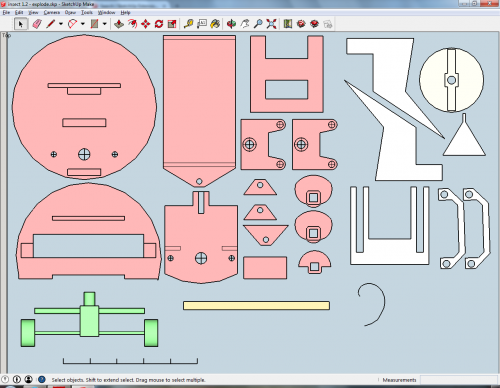
These are the parts needed for each segment

build day 2
today I built the forward leg movement. Here the parts:

And the working demo is in the second video
update sept 15 2014: one leg is moving: see 3rd video
update sept 16 2014: and now it crawls without making progress! see video 4.