



BS2 Rebound
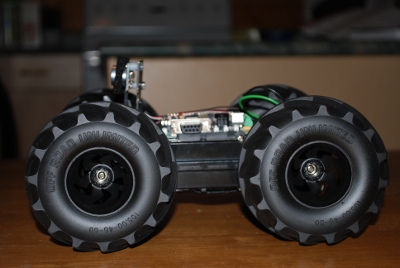
This robot is based on the Tyco Rebound chasis. It is controleed by a Basic Stamp 2e. The motors are controlled by a L298 Compact Motor Driver Kit. It uses a Parallax Ping sensor to navigate and avoid obstacle. It is still a work in progress.
Navigate around via ultrasound
- Actuators / output devices: Tyco Rebound chasis, L298 motor controller
- Control method: autonomous
- CPU: Parallax BS2
- Sensors / input devices: Parallax Ping)))
- Target environment: outdoor