



Brushbug
UPDATE: BLOG AND ADDED NANOMUSCLE VID. A spinoff from my solar powered Crumbot dream. I have a patio that gets showered with small seed pods that invariably get stepped on and tracked into the house with all their squishy goodness. If I could have a solar powered photopopper with edge detection and reversability that toted around a brush to sweep with, things would be good :)
Project plan:
- Determine suitable photopopper platform.
- Fabricate popper and tune components to real world environment.
- Source suitable actuator for sweeping pummer.
- Build combined popper/pummer platform.
- Make robot weatherproof.
- Lay in hammock and watch robot do yardwork.
Materials:
- 74HC240
- 1F 5.5V gold capacitor
- 4.7F 5.5V supercap
- CdS sensors
- GM17 motors @ 228:1
- Solarbotics tactile feelers
- Solar panel, 8.0V @ 264mA
- Solar panel, 6.0V @ 370mA
- Assorted maxibug v5 components
Photolog:
- Determine suitable popper platform.
After some deliberation between a simple Miller popper, a Baskbot, and the v5 Maxibug, I went with the Maxibug design. I liked how it went from phototropic to photophobic, ideally doubling its field of operation. Shadow protection is built into the design to some degree as a side effect. The patio I look to apply the robot to experiences partial shade; a considerable problem for solar powered photopoppers it seems. In short, maxibug actively seeks light at around 2.5V. When the supercap reaches full charge at 5V the behavior flips and it goes photophobic until voltage drops back to ~2.5V. It also incorperates a reversing switch for tactile sensors (note, LED2 in the schematic is a flashing LED):
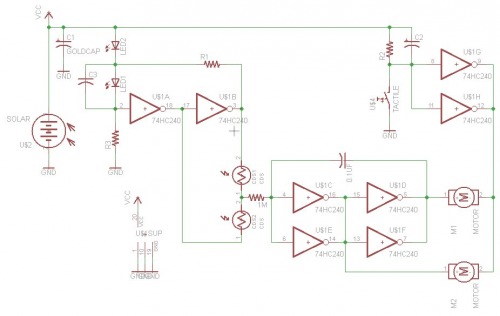
After working with Wilf from the BEAM Yahoo groups, the above schematic came to fruition. The 228:1 gearing of the GM17s makes for immobilizing power-sucking jitter between the motors when the CdS cell are in balance. Adjusting the 1M resistor between the cells and the cap (now a 0.1uF) between input 4/6 and output 5/7 is the key to an efficient balance. I also thought of just gutting out the GM17s and adding the lower gear sets from Didel (51:1 and 100:1 sets I believe). The 228:1 ratio does make the bot very slow, but then again, what hurry is it in?
2. Fabricate popper and tune components to real world environment.
I pretty much just used the base from Crumbot to test the popper circuit. It works pretty well as it turns out.
A shot of the breadboard riding the proto Crumbot base:

You can see the FLED covered with duct tape to minimize resistance from ambient light. You can also see the shrink-tubed CdS cells. They were far too sensitive previous to the modification.
Front view, RTR:
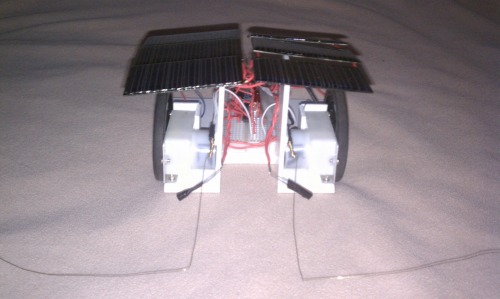
The popper works as described, but until I maximize the efficiency of the RC combo, it doesn't have enough juice. It will charge to 5V, get photophobic, shuffle about a body length into the shade, and then go phototropic... for about a body length. A very short loop.
3. Source suitable actuator for sweeping pummer.
After considering motors and servos for moving the brush, I remembered the Stiquito. It uses Nitinol to move its legs. By applying current to Nitinol it heats and contracts. Remove the current and it cools and returns to its oringinal length. I found this rotary Migamuscle actuator that I believe is perfect for the job:

Small, easy to use, and lightweight, it fits the bill in all ways. Another LMR member goes over its high points elsewhere. Hopefully with minimal fabrication it can be attached to a small broom (I'm looking at a Coleman campsite broom for the job).
After shooting the first vid I noticed the switch from photophobic to photophillic only happens when the reverse tactile feelers are touched. I still need to look into that.
Autonomously navigate and sweep patio
- Actuators / output devices: Solarbotics GM17 motors
- Power source: Solar
- Sensors / input devices: Photoresistors, tactile sensors
- Target environment: outdoor