


BritishTiny Tin robot
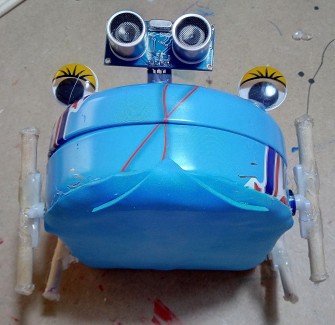
I met last month Andrew (ignoblegnome ) in Philadelphia, and he showed me his Tiny Tin robot. My daugther asked to make one, and as I told her: Let's Make Robots! Here is the result: a fully autonomous Tiny Tin in its first basic iteration, without any sensor still. However it is already funny to see moving.
I use two separated power supplies so I avoid any issue between servos and CPU voltage. In some cases it can render strange behaviours.
Here my son also playing with the tin box when starting the making:
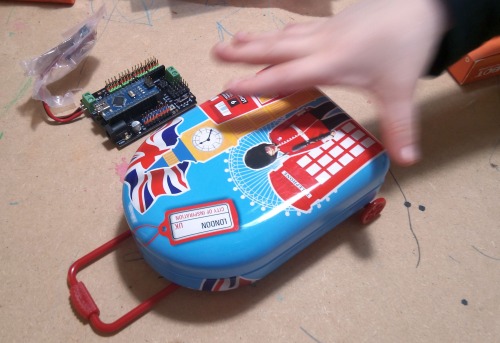
The box is from an London airport that's why it has UK related decoration. I think it gives also some personality to the robot :-)
Inside the tin box there were some sweets so we can enjoy also them:

The two difficult steps in this project is placing the servos right and making the holes in the tin box, also distributing all elements in for the system inside the box so you can close it fine...
Here placing the holes:

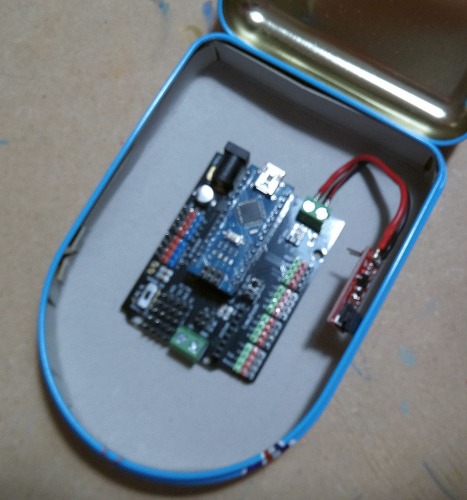
As the box inside is bare metal inside, I had to put some cardboard to protect the electronics. Here you see the arduino nano with the expansion board and a boost and protection voltage converter for the LiPo battery:
Then I placed everything inside to see everything fit fine:
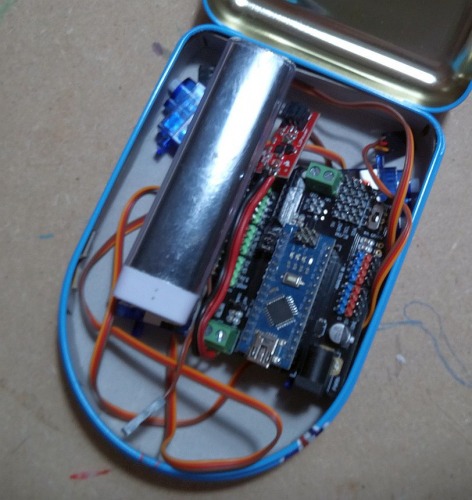
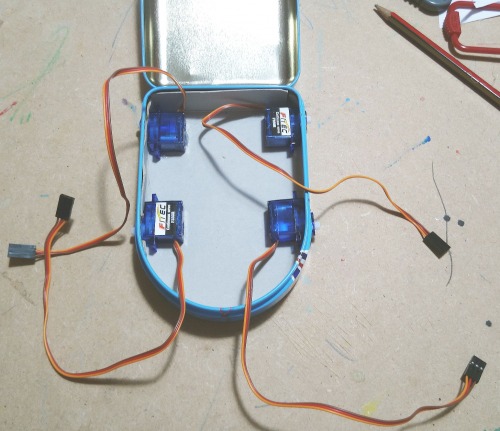
Then I placed the servos with some hotglue:
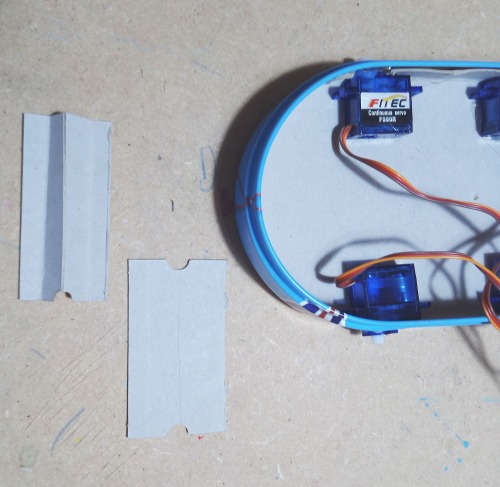
But I found the issue the cardboard was moving and the servos were not steady enough when pressing them from outside. So I added two spacers (made with cardboard and attached with hotglue) between the servos, two by two:
Then I connected the servos to the Arduino expansion board at four PWM outputs, paper shows the current arduino outputs where each servo is attached so it will facilitate programming in the future:

Then I just needed to place everything inside and program it with a simple test software to make the servos work. Servos just rotate from 0 to 180º then back, but it allows a simple functional test:

You can see my first video about is here.
Next steps are adding some LEDs and sensors to gives it some autonomous freedom.
15th April 2017
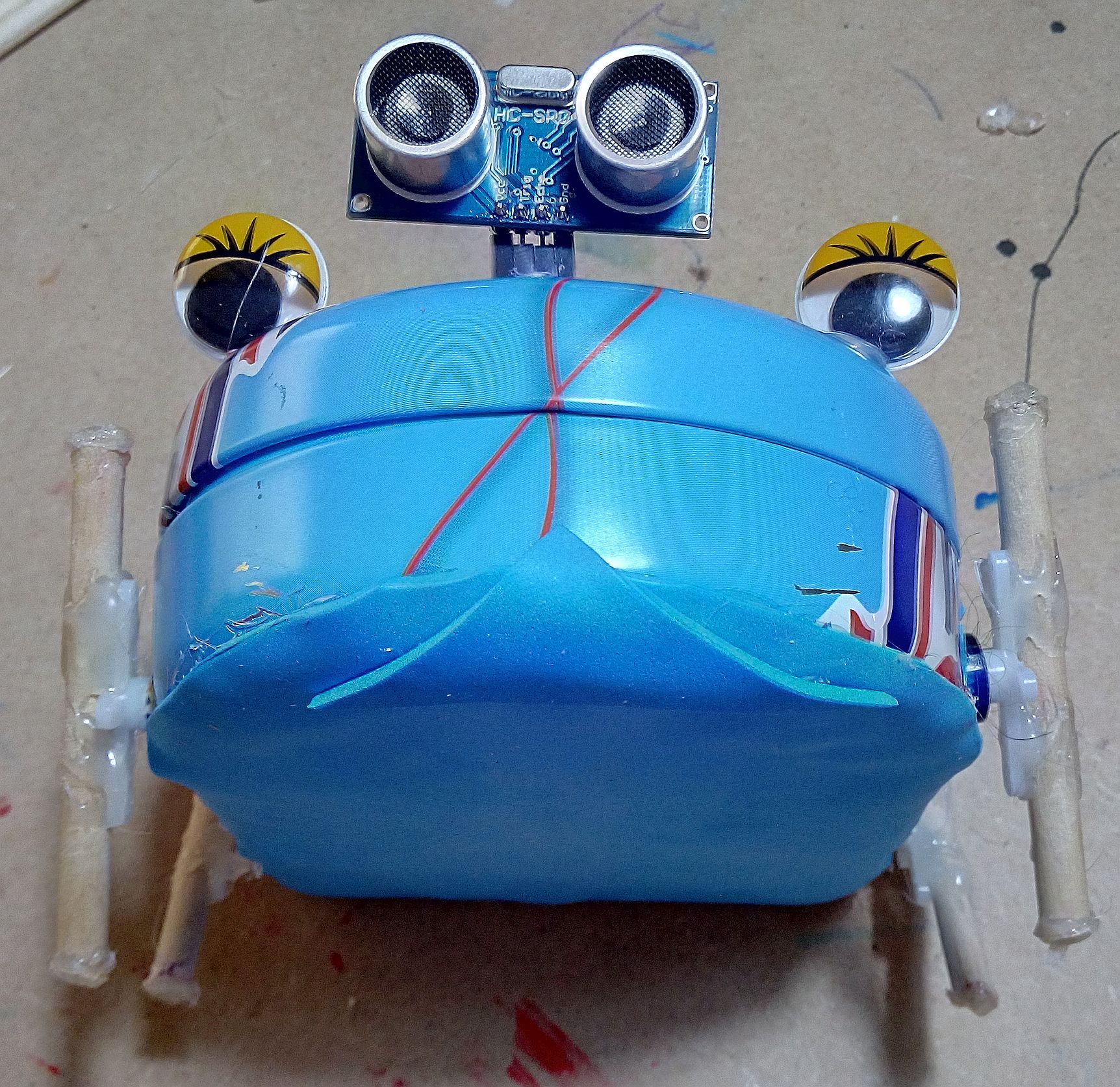
Well I added an ultrasonic sensor to give some autonomy to the robot, also added small stick to each leg, so now the robot has much more traction and speed!
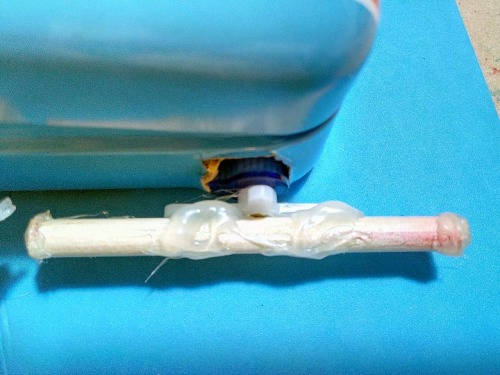
I found also the robot was hitting ground and making noise. With some foamy I solved the issue.

Please let me know your thoughs at the comments. Thanks!
Moves around
- Control method: autonomous
- CPU: Atmega 328
- Operating system: Arduino
- Programming language: C++
- Target environment: indoor