



Bracerbot Beta
My first quadruped, I wanted to make it special, so after you finish gathering data robot will come to you and will wrap around you arm as a barecelet (see video). Still need to programm walking and data sending via bluetooth, perhaps I will make an android app for it.
*Update 18.9* spray-painted legs to black, finally started to program some walking. Currently I'm working more on gait and I would like to create processing application for him.
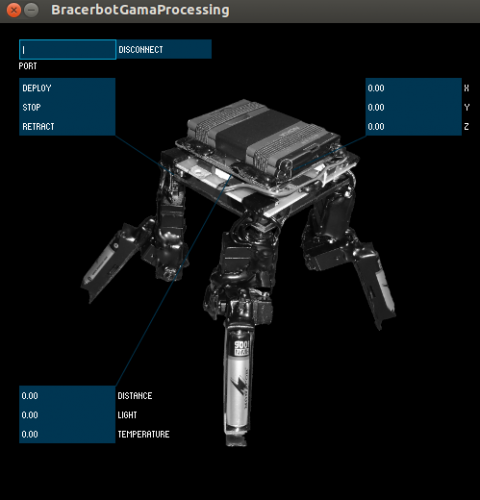
*Update 28.9* I have written small Processing app for bot using controlP5 library. Also data obtaining now works, lags on the app are caused by screen capture program.
Walks around sends data from multiple sensors via bluetooth then sticks to arm
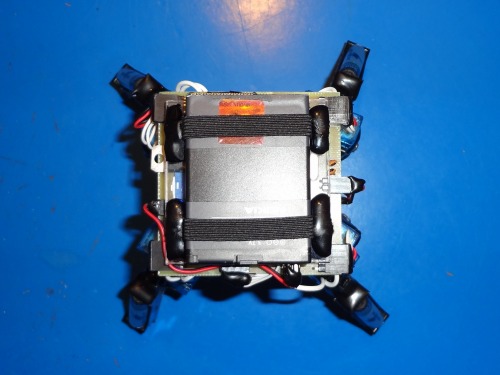
- Actuators / output devices: 8 servos
- Control method: autonomous or controlled via bluetooth
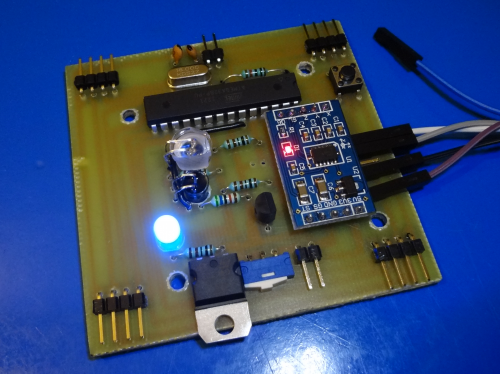
- CPU: Atmega 328
- Operating system: Arduino
- Power source: 2x3.7V nokia batteries for board + bluetooth + sensors, 4x1.5V AAA rechargable batteries for servo
- Programming language: Arduino
- Sensors / input devices: LM35 temperature sensor, 3 axis accelerometer, photoresistor, IR distance
- Target environment: indoor